

【導(dǎo)讀】政府舉措(例如德國的工業(yè)4.0和中國的中國制造2025)正在加快制造業(yè)朝向普遍網(wǎng)絡(luò)自動化發(fā)展的趨勢。此外,智能傳感器系統(tǒng)正在提高自動化程度,提供更多的數(shù)據(jù)來監(jiān)測和控制生產(chǎn)過程。特別是,中國制造2025旨在快速發(fā)展包括電動汽車、新一代信息技術(shù)(IT)和電信、先進(jìn)機(jī)器人和人工智能在內(nèi)的高科技產(chǎn)業(yè)。有了更先進(jìn)的系統(tǒng)之后,就需要采用更先進(jìn)的方法來確保系統(tǒng)的可靠性。
基于狀態(tài)的監(jiān)控對于實(shí)現(xiàn)工業(yè)4.0至關(guān)重要
政府舉措(例如德國的工業(yè)4.0和中國的中國制造2025)正在加快制造業(yè)朝向普遍網(wǎng)絡(luò)自動化發(fā)展的趨勢。此外,智能傳感器系統(tǒng)正在提高自動化程度,提供更多的數(shù)據(jù)來監(jiān)測和控制生產(chǎn)過程。特別是,中國制造2025旨在快速發(fā)展包括電動汽車、新一代信息技術(shù)(IT)和電信、先進(jìn)機(jī)器人和人工智能在內(nèi)的高科技產(chǎn)業(yè)。有了更先進(jìn)的系統(tǒng)之后,就需要采用更先進(jìn)的方法來確保系統(tǒng)的可靠性。
對機(jī)器人和旋轉(zhuǎn)機(jī)器(例如渦輪機(jī)、風(fēng)扇、泵和電機(jī))實(shí)施的基于狀態(tài)的監(jiān)控會記錄與機(jī)器的健康和性能相關(guān)的實(shí)時數(shù)據(jù),以便有針對性地實(shí)施預(yù)測維護(hù)和優(yōu)化控制。在機(jī)器生命周期的早期進(jìn)行有針對性的預(yù)測維護(hù),可以減少生產(chǎn)停機(jī)的風(fēng)險,從而提高可靠性、顯著節(jié)約成本和提高工廠的生產(chǎn)率。
如何實(shí)施基于狀態(tài)的有線監(jiān)控解決方案?
要對工業(yè)機(jī)器實(shí)施基于狀態(tài)的監(jiān)控,可以利用一系列傳感器數(shù)據(jù),如電氣測量、振動、溫度、油品質(zhì)量、聲學(xué)和流程測量(如流量和壓力)。但是,振動測量是目前最常見的,因?yàn)樗梢宰羁煽康刂甘境鰴C(jī)械問題,例如不平衡和軸承故障。本文主要研究振動傳感的應(yīng)用,但該方法同樣適用于來自其他傳感器的數(shù)據(jù)。
這種傳輸意味著將來自感測節(jié)點(diǎn)的傳感器數(shù)據(jù)發(fā)送至主控制器或者云高度依賴應(yīng)用。在許多應(yīng)用中,一些本地數(shù)據(jù)會在終端節(jié)點(diǎn)處理,匯總數(shù)據(jù)隨后通過無線方式發(fā)送至網(wǎng)絡(luò)網(wǎng)關(guān),或者直接通過蜂窩鏈路發(fā)送至云或分析服務(wù)器。在這些情況下,傳輸?shù)臄?shù)據(jù)量通常都相當(dāng)?shù)?,而且因?yàn)榻K端節(jié)點(diǎn)是由電池供電,所有通常要求保持低功耗。在其他應(yīng)用中,需要進(jìn)行原始傳感器數(shù)據(jù)傳輸。例如,在分析之前可能需要對來自多個傳感器的數(shù)據(jù)進(jìn)行調(diào)整和融合。在使用數(shù)據(jù)進(jìn)行實(shí)時控制的應(yīng)用中,也需要進(jìn)行原始數(shù)據(jù)傳輸。在這些應(yīng)用中,更可能采用有線接口作為數(shù)據(jù)傳輸解決方案。
工業(yè)應(yīng)用的CbM可以使用ADI公司經(jīng)過優(yōu)化的微機(jī)電系統(tǒng)(MEMS)加速度計(jì)、低功耗微控制器和有線iCoupler®隔離接口信號鏈來提取、調(diào)整來自遠(yuǎn)程CbM從機(jī)的機(jī)器健康狀況數(shù)據(jù),并將其可靠回傳至主控制器進(jìn)行分析。隨著時間的推移,可以使用機(jī)器健康數(shù)據(jù)創(chuàng)建基于軟件的模型來確定機(jī)器行為的變化,并主動維護(hù)機(jī)器健康。在一些應(yīng)用中,如數(shù)控機(jī)床,數(shù)據(jù)也可以用來實(shí)時優(yōu)化系統(tǒng)性能。
實(shí)現(xiàn)有線CbM接口的挑戰(zhàn)包括:在長電纜上運(yùn)行時EMC的穩(wěn)健性、以高波特率傳輸時數(shù)據(jù)的完整性(用于實(shí)時傳輸CbM數(shù)據(jù)流),以及通信物理層/協(xié)議的不匹配。ADI公司的信號鏈和系統(tǒng)級專業(yè)知識為實(shí)現(xiàn)有線CbM接口提供了幾種可能的選擇。
本文分兩個部分,第一部分介紹了ADI公司的有線接口解決方案,該方案幫助客戶縮短設(shè)計(jì)周期和測試時間,讓工業(yè)CbM解決方案更快地進(jìn)入市場。下一篇文章重點(diǎn)介紹詳細(xì)的物理層設(shè)計(jì)考量因素,包括主控制器和有線CbM從控制器。
有線CbM設(shè)計(jì)實(shí)現(xiàn)
設(shè)計(jì)和部署基于狀態(tài)的有線監(jiān)控解決方案需要考量多個系統(tǒng)性能因素,并進(jìn)行權(quán)衡取舍。
首先,在選擇合適的MEMS加速度計(jì)時,必須考慮需要測量的故障類型,從而選擇合適的帶寬和噪聲性能MEMS來滿足系統(tǒng)的要求。邊緣節(jié)點(diǎn)處理需要仔細(xì)匹配所選的處理器,以確保最高的系統(tǒng)靈活性。
其次,有線CbM系統(tǒng)的設(shè)計(jì)需要精心選擇合適的有線通信協(xié)議和物理層,以實(shí)現(xiàn)高速實(shí)時數(shù)據(jù)流傳輸。實(shí)現(xiàn)有線接口需要仔細(xì)考慮EMC性能、數(shù)據(jù)傳輸電纜、連接器和電纜上的電源傳輸。
選擇合適的MEMS加速度計(jì)
選擇合適的MEMS振動傳感器涵蓋幾個方面:
軸數(shù)
被監(jiān)測的軸數(shù)通常與故障類型和傳感器的安裝布置呈函數(shù)關(guān)系。如果能明顯看出故障涉及一個主導(dǎo)軸,并且在該軸上有一個清晰的傳輸路徑,那么采用單軸傳感器就足夠了。三軸傳感對于多軸中包含能量的故障或故障能量傳輸路徑不明確的故障是有用的。
故障類型
被監(jiān)測的故障類型對傳感器選擇有重要影響。傳感器的噪聲密度和帶寬是這方面的重要指標(biāo),因?yàn)樗鼈儧Q定了能夠可靠提取的振動水平和頻率范圍。例如,對于低轉(zhuǎn)速機(jī)器的不平衡和失調(diào)故障,可能需要一個低噪聲密度傳感器,但帶寬要求相當(dāng)?shù)停X輪故障檢測需要傳感器兼具低噪聲密度和高帶寬。
性能要求
除了故障類型外,了解CbM的性能要求也很重要。對基本交通燈類型的狀態(tài)指示器實(shí)施報警檢測,需要通過不同水平的性能來進(jìn)行復(fù)雜的預(yù)測。這顯然適用于正在部署的分析和算法,但也會影響傳感器的選擇。傳感器在帶寬、噪聲密度和線性度方面的性能水平越高,分析能力就越強(qiáng)。
選擇合適的信號處理
設(shè)計(jì)考量因素包括:
加速度計(jì)輸出
加速度計(jì)的輸出一般是模擬或串行數(shù)字信號,通常是SPI。模擬輸出傳感器將需要一個數(shù)字轉(zhuǎn)換階段,也需要進(jìn)行一些信號調(diào)理。這可以是一個支持前置放大器調(diào)理的分立ADC,也可以是微控制器中的嵌入式ADC。
邊緣節(jié)點(diǎn)處理要求
為了減輕數(shù)據(jù)鏈路和/或中央控制器/服務(wù)器的負(fù)擔(dān),邊緣節(jié)點(diǎn)上可能需要一些基本的FFT或信號處理算法。
數(shù)據(jù)傳輸協(xié)議要求
ADC或傳感器的輸出通常是SPI接口。它本身并不提供任何機(jī)制用于實(shí)施數(shù)據(jù)完整性檢查、確定時間戳、混合來自不同傳感器的數(shù)據(jù)等。在傳輸之前,將傳感器數(shù)據(jù)封裝在邊緣節(jié)點(diǎn)的高級協(xié)議中是非常有用的。這可以提高傳感器接口的穩(wěn)健性和靈活性,但是要求在邊緣節(jié)點(diǎn)上妥當(dāng)處理和封裝數(shù)據(jù)流。
有關(guān)更多信息,請參考《模擬對話》文章“為您的應(yīng)用選擇最合適的MEMS加速度計(jì)”。
將加速度計(jì)輸出移植到有線通信總線
如前所述,加速度計(jì)的輸出一般是模擬或串行數(shù)字信號,通常是SPI。SPI輸出可以在本地處理(允許協(xié)議靈活性),然后添加到物理層接口,或者直接移植到物理層。
SPI是一個不平衡的單端串行接口,用于短距離通信。要在更長的距離內(nèi)直接將SPI移植到物理層,需要使用RS-485線路驅(qū)動器和接收器。RS-485信號傳輸是平衡的差分式傳輸,本身便能抗干擾,且通過長線纜長度時具有穩(wěn)健性。
在SPI主機(jī)和從機(jī)之間的較長距離上使用SPI時,存在一些挑戰(zhàn)。SPI從本質(zhì)上是同步的,具有一個由SPI主機(jī)啟動的時鐘(SCLK)。SPI數(shù)據(jù)線路——主機(jī)輸出從機(jī)輸入(MOSI)和主機(jī)輸入從機(jī)輸出(MISO)——與SCLK同步,在短距離范圍內(nèi)這是可以實(shí)現(xiàn)的。SPI還有一個有效的、低使能芯片選擇(CS)信號,如果需要,它允許單獨(dú)的從機(jī)尋址。
為了恢復(fù)主機(jī)和從機(jī)之間的同步,可以將來自從機(jī)的時鐘信號反饋給主機(jī),或者使用時鐘相移補(bǔ)償主控制器的電纜延遲。時鐘的相移必須與系統(tǒng)的總延遲匹配。AN-1397提供主微控制器延遲補(bǔ)償?shù)膶?shí)現(xiàn)細(xì)節(jié)。
有線通信物理層
進(jìn)行長距離通信時,需要采用穩(wěn)健可靠的物理層。如前所述,RS-485信號傳輸是平衡的差分式傳輸,本身便能抗干擾。系統(tǒng)噪聲均等地耦合到RS-485雙絞線電纜中的每條導(dǎo)線。一個信號的發(fā)射與另一個信號相反,耦合到RS-485總線的電磁場彼此抵消。這降低了系統(tǒng)的電磁干擾(EMI)。讓RS-485非常適合CbM系統(tǒng)的一些額外關(guān)鍵優(yōu)點(diǎn)包括:
● 更高的數(shù)據(jù)速率,電纜長度較短(小于100米)時可達(dá)50 Mbps
● 數(shù)據(jù)速率較低時,線纜長度可達(dá)1000米
● 全/半雙工RS-485和RS-422多驅(qū)動器/接收器對可以使用最小量的組件,將雙向SPI轉(zhuǎn)換為RS-485總線信號
● 較寬的共模輸入范圍允許主機(jī)和從機(jī)之間具備接地電位差異
?
有線接口的EMC性能
在長電纜中傳輸時,通信網(wǎng)絡(luò)可能會受到危害影響,例如較大的共模噪聲、接地電位差異和高壓瞬態(tài)。
傳導(dǎo)和輻射噪聲源可影響100米線纜長度內(nèi)的通信可靠性。采用ADI公司的iCoupler芯片級變壓器隔離技術(shù)可以提高對這些噪聲源的抗干擾能力。AN-1398概述了利用iCoupler技術(shù)可以實(shí)現(xiàn)的對常見工業(yè)瞬態(tài)的抵抗力。
在工廠自動化環(huán)境中,系統(tǒng)設(shè)計(jì)人員通常無法控制提供通信網(wǎng)絡(luò)的電氣裝置。最好的做法是假定存在接地電位差異。在運(yùn)動控制系統(tǒng)中,可能會產(chǎn)生數(shù)百伏的接地電位差異。RS-485通信節(jié)點(diǎn)需要電流隔離電源和數(shù)據(jù)線路能在這些環(huán)境中可靠地運(yùn)行。信號和isoPower隔離器件提供峰值可達(dá)600 V(基礎(chǔ))或353 V(增強(qiáng)型)的最大連續(xù)工作電壓。在存在較大接地電位差異的情況下,基礎(chǔ)絕緣支持實(shí)現(xiàn)可靠的通信。增強(qiáng)型絕緣保護(hù)操作人員免于在廠區(qū)受到電擊。
在有線通信網(wǎng)絡(luò)中,暴露在外的連接器和電纜可能遭受許多嚴(yán)苛的高壓瞬態(tài)影響。與變速電力驅(qū)動系統(tǒng)的EMC抗擾度要求相關(guān)的系統(tǒng)級IEC 61800-3標(biāo)準(zhǔn),要求最低±4 kV(接觸)/±8 kV(空氣)的IEC 61000-4-2 ESD保護(hù)。ADI公司的新一代RS-485收發(fā)器提供高于±8 kV(接觸)/±8 kV(空氣)IEC 61000-4-2 ESD保護(hù)。
數(shù)據(jù)線路上的幻象電源
在主控制器和遠(yuǎn)程CbM傳感器節(jié)點(diǎn)之間分配電力和數(shù)據(jù)線路需要采用創(chuàng)新的解決方案來降低電纜成本。將數(shù)據(jù)和電力線路融合在單一雙絞線上意味著可以大幅節(jié)省系統(tǒng)成本,以及可以在空間有限的終端傳感器節(jié)點(diǎn)位置采用更小的印刷電路板(PCB)連接器解決方案。
功率和數(shù)據(jù)通過電感電容網(wǎng)絡(luò)分布在雙絞線對上。高頻數(shù)據(jù)通過串聯(lián)電容與數(shù)據(jù)線路耦合,同時保護(hù)RS-485收發(fā)器免受直流總線電壓影響。主控制器上的電源通過電感器連接到數(shù)據(jù)線路,然后使用電纜遠(yuǎn)端的CbM從傳感器節(jié)點(diǎn)上的電感器進(jìn)行濾波。
電纜兩端的電感應(yīng)良好匹配,以避免產(chǎn)生差分模式噪聲,自諧振頻率應(yīng)至少達(dá)到10 MHz,避免對ADI公司新一代振動測量系統(tǒng)的實(shí)時突發(fā)模式產(chǎn)生干擾。注意,電源和數(shù)據(jù)耦合解決方案必須添加到不需要直流數(shù)據(jù)內(nèi)容的數(shù)據(jù)線路中,例如MOSI或MISO到RS-485的擴(kuò)展件。
推薦的解決方案和性能取舍
基于所提出的設(shè)計(jì)考量,以下組件為穩(wěn)健的有線工業(yè)振動測量解決方案提供了最佳路徑。
● ADcmXL3021,寬帶寬、低噪聲、三軸振動傳感器
● ADuM5401/ADuM5402,四通道、2.5 kV隔離器,采用集成DC/DC轉(zhuǎn)換器
● ADM3066E,50 Mbps半雙工RS-485收發(fā)器
● ADM4168E,30 Mbps雙通道RS-422收發(fā)器
● LTC2858-1,20 Mbps全雙工RS-485收發(fā)器
● ADP7104,20 V、500 mA、低噪聲CMOS LDO穩(wěn)壓器
推薦解決方案
ADcmXL3021 MEMS加速度計(jì)對于這三種解決方案都是通用的。這個加速度計(jì)具備超低噪聲密度(25 µg/√Hz),支持出色的分辨率。ADcmXL3021也具備寬帶寬(從直流一直到10 kHz,5%平坦度),可以跟蹤許多機(jī)器平臺上的關(guān)鍵振動特征。ADcmXL3021為客戶提供一個經(jīng)過機(jī)械優(yōu)化的鋁封裝,可以在廣泛的頻率范圍內(nèi)提供與集成MEMS傳感器的穩(wěn)定耦合。這就保證了可以可靠提取和調(diào)理從受測設(shè)備獲得的振動特征。
ADcmXL3021可以提供SPI輸出,可以直接與RS-485/RS-422器件連接,也可以通過微處理器和/或iCoupler信號和功率隔離與RS-485/RS-422器件連接,如圖1所示。為了實(shí)時監(jiān)測工業(yè)設(shè)備上的振動特征,ADcmXL3021提供實(shí)時流傳輸模式,其工作速率約為12 Mbps SPI。
為了將實(shí)時流傳輸SPI模式連接到RS-485總線,必須選擇數(shù)據(jù)速率出色的組件。
ADM3066E/ADM4168E/LTC2858-1 RS-485/RS-422收發(fā)器均以20 Mbps及以上的數(shù)據(jù)速率運(yùn)行。
對于圖1所示的選項(xiàng)1和選項(xiàng)2(可以經(jīng)由SPI直接與RS-485連接),ADM3066E和ADM4168E提供一個可靠的接口,在從機(jī)振動傳感器節(jié)點(diǎn)實(shí)現(xiàn)SPI 3接收、1發(fā)射(3+1)配置。SPI CS接收信號使用ADM3066E、SPI CLK和MOSI實(shí)現(xiàn),MISO信號使用ADM4168E實(shí)現(xiàn)。在實(shí)時流傳輸模式下運(yùn)行時,ADcmXL3021向主微控制器發(fā)送一個中斷信號,以在新數(shù)據(jù)突發(fā)可以捕獲時進(jìn)行標(biāo)記。中斷信號(/BUSY)也可以使用ADM4168E傳輸給主機(jī)。
完整的解決方案由主機(jī)發(fā)送至ADcmXL3021的三個信號(MOSI、CS、CLK),以及從ADcmXL3021發(fā)回主機(jī)的兩個信號(MISO、/BUSY)組成。5×單端信號僅用ADM4168E和ADM3066E兩個組件就可以轉(zhuǎn)換為差分信號。差分信號可以使用RJ50連接器和插頭轉(zhuǎn)換,與工業(yè)標(biāo)準(zhǔn)RJ45以太網(wǎng)連接器相比,這兩者占用的PCB面積幾乎相同。ADM3066E和ADM4168E收發(fā)器提供大于±8 kV的(接觸)/±8 kV(空氣)IEC 61000-4-2 ESD保護(hù),在直接連接到有線電纜接口時,提供必需的可靠性。
對于選項(xiàng)3,微控制器可以預(yù)先處理ADcmXL3021 SPI輸出,也可以在SPI和其他串行接口(例如UART)之間執(zhí)行協(xié)議轉(zhuǎn)換。UART是RS-485接口常用的一種異步協(xié)議。UART由發(fā)射和接收信號以及發(fā)射使能信號組成,所有這些信號都可以直接連接到全雙工RS-485收發(fā)器,例如LTC2858-1。在全雙工模式下,LTC2858-1允許同時進(jìn)行雙向數(shù)據(jù)傳輸,這與SPI雙向數(shù)據(jù)傳輸?shù)囊笙嗥ヅ?。該微控制器可以處理同步SPI到異步UART協(xié)議的轉(zhuǎn)換。
ADuM5401/ADum5402是業(yè)界體積最小的信號和電源隔離器件。它們包含一個集成式DC/DC轉(zhuǎn)換器,采用5.0 V或3.3 V電壓時(5.0V輸入電源),可提供最高500 mW調(diào)節(jié)隔離功率。
在圖1中,選項(xiàng)2包含ADuM5401,它從數(shù)據(jù)總線獲取5 V DC,然后為ADcmXL3021提供3 V隔離電源。ADuM5401還包括4個信號隔離通道,采用支持3+1 SPI隔離的配置。
圖1中的選項(xiàng)3包含ADuM5402,它與ADuM5401相似。關(guān)鍵的區(qū)別在于ADuM5402提供2個發(fā)射和2個接收數(shù)字隔離通道。
如前所述,ADuM5401/ADuM5402可以提高有線CbM接口的EMC抗擾度,保護(hù)ADcmXL3021免受RS-485電纜接口上的高壓干擾和接地電位差異。
性能取舍
表1使用許多關(guān)鍵指標(biāo)比較了這三種解決方案,包括設(shè)計(jì)靈活性、PCB面積、解決方案成本、復(fù)雜性和EMC性能。
在CbM傳感器節(jié)點(diǎn)集成一個微控制器將增加設(shè)計(jì)的靈活性,但會增大PCB面積,且增加軟件復(fù)雜性。由于主CbM節(jié)點(diǎn)將配有一個處理器,這意味著圖1中的選項(xiàng)3本質(zhì)上將是一個雙微控制器系統(tǒng),與主CbM節(jié)點(diǎn)上的單個微控制器相比,該系統(tǒng)的啟動和運(yùn)行速度將更慢。
選項(xiàng)1和選項(xiàng)2的設(shè)計(jì)靈活性較低,但是提供了一種更快速部署的路徑,因?yàn)樗鼈冎С衷赗S-485鏈路上集成復(fù)雜度低且透明的SPI。選項(xiàng)1和選項(xiàng)2還可以采用比選項(xiàng)3體積更小的PCB,這需要額外的PCB區(qū)域來敷設(shè)微控制器和相關(guān)電路(例如,一個時鐘振蕩器和幾個無源組件)。
將iCoupler信號和電源隔離添加到選項(xiàng)2和選項(xiàng)3會占用最小的PCB面積,且可以提高EMC性能(超過使用RS-485/RS-422收發(fā)器的片內(nèi)保護(hù)可以實(shí)現(xiàn)的性能)。

圖1.實(shí)現(xiàn)可靠、高度集成、有線MEMS加速度計(jì)基于狀態(tài)監(jiān)測的解決方案的選項(xiàng)。
表1.CbM選項(xiàng)之間的取舍比較

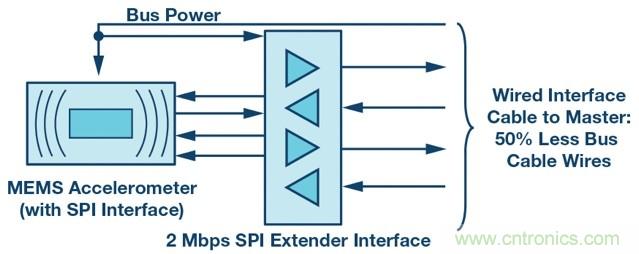
圖2.LTC4332 SPI擴(kuò)展接口幫助節(jié)省線纜成本。
數(shù)據(jù)速率較低的解決方案
對于以較低的數(shù)據(jù)速率(小于2 Mbps)運(yùn)行的有線應(yīng)用,LTC4332 SPI擴(kuò)展器提供了一種替代方案,用于加固主從傳感器節(jié)點(diǎn)之間的SPI鏈接。LTC4332可以傳輸SPI數(shù)據(jù),包括通過兩條雙絞線傳輸?shù)闹袛嘈盘?。該解決方案可以顯著節(jié)約成本,因?yàn)榕c標(biāo)準(zhǔn)解決方案相比,它最多可節(jié)省50%的總線線纜。
作者簡介
Richard Anslow是ADI公司自動化與能源業(yè)務(wù)部互連運(yùn)動和機(jī)器人團(tuán)隊(duì)的系統(tǒng)應(yīng)用工程師。他的專長領(lǐng)域是基于狀態(tài)的監(jiān)測和工業(yè)通信設(shè)計(jì)。他擁有愛爾蘭利默里克大學(xué)頒發(fā)的工程學(xué)士學(xué)位和工程碩士學(xué)位。聯(lián)系方式:richard.anslow@analog.com。
Dara O’Sullivan是ADI公司自動化與能源業(yè)務(wù)部互連運(yùn)動和機(jī)器人團(tuán)隊(duì)的系統(tǒng)應(yīng)用經(jīng)理。他的專長領(lǐng)域是工業(yè)運(yùn)動控制應(yīng)用的功率轉(zhuǎn)換、控制和監(jiān)測。他擁有愛爾蘭科克大學(xué)工程學(xué)士、工程碩士和博士學(xué)位。自2001年起,他便從事研究、咨詢和工業(yè)領(lǐng)域的工業(yè)與可再生能源應(yīng)用方面的工作。聯(lián)系方式:dara.osullivan@analog.com。
推薦閱讀:

