

【導讀】MEMS陀螺儀提供了測量旋轉(zhuǎn)角速度的一種簡單方法,其封裝很容易連接印刷電路板,因此被廣泛用于許多不同類型的運動控制系統(tǒng)中作為反饋檢測元件。在這種類型的功能中,角速度信號(MEMS陀螺儀輸出)中的噪聲對關(guān)鍵系統(tǒng)行為有著直接的影響,比如平臺穩(wěn)定性,因此通常是影響MEMS陀螺儀能夠達到的精度級別的主要因素。
對于定義和開發(fā)新的運動控制系統(tǒng)的系統(tǒng)架構(gòu)師和開發(fā)人員來說,“低噪聲”是一種自然的且具有指導意義的指標。要想進一步理解這個指標(低噪聲),需要將關(guān)鍵的系統(tǒng)級標準(比如指向精度)轉(zhuǎn)換為MEMS陀螺儀數(shù)據(jù)手冊中常見的噪聲指標,這是早期的概念和架構(gòu)化工作的重要組成部分。理解系統(tǒng)對陀螺儀噪聲行為的依賴性有很多好處,例如能夠建立針對反饋檢測元件的相關(guān)要求,或反過來分析對某個特定陀螺儀中噪聲的系統(tǒng)級響應。
一旦系統(tǒng)設(shè)計師深入理解了這個關(guān)系,他們就能重點掌握影響角速度反饋環(huán)路中噪聲行為的兩個關(guān)鍵領(lǐng)域:(1)為MEMS陀螺儀的選擇開發(fā)最合適的標準,(2)在整個傳感器的集成過程中保持合適的噪聲性能。
運動控制的基本原理
建立MEMS陀螺儀中噪聲行為之間的有用關(guān)系并分析它對關(guān)鍵系統(tǒng)行為有何影響通常都要從理解系統(tǒng)如何工作開始。圖1提供了一個運動控制系統(tǒng)的架構(gòu)例子,它將重要的系統(tǒng)組件分解成了功能模塊。這種系統(tǒng)的功能性目標是建立一個對慣性運動敏感的個人或設(shè)備用穩(wěn)定平臺。自動駕駛汽車平臺上的微波天線就是這樣一個應用例子,它要在造成車輛方向突然改變的速度等惡劣條件下進行操控。如果沒有對指向角度的實時控制,這些高度方向性的天線在經(jīng)歷這種慣性運動時可能無法支持連續(xù)的通信。
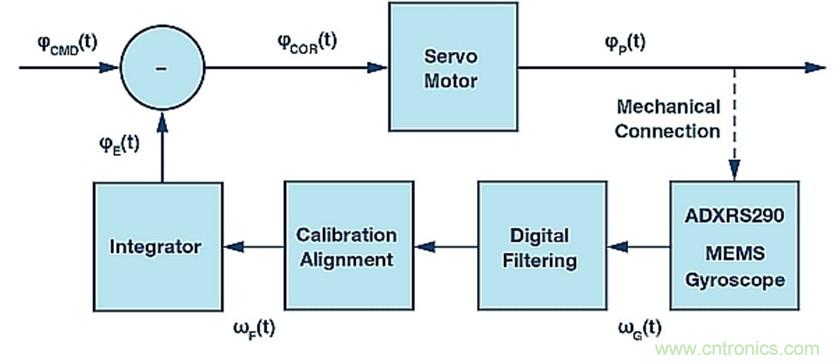
圖1:運動控制系統(tǒng)架構(gòu)例子
圖1所示的系統(tǒng)使用了一個伺服電機,它將以與系統(tǒng)其余部分相同或相反的方向進行旋轉(zhuǎn)。反饋環(huán)路從MEMS陀螺儀開始,由陀螺儀監(jiān)視“穩(wěn)定平臺”上的旋轉(zhuǎn)速度(ωG)。陀螺儀的角速度信號隨后饋入由濾波、校準、對齊和積分組成的特殊應用數(shù)字信號處理電路,產(chǎn)生實時的方向反饋信號(φE)。伺服電機的控制信號(φCOR)來自這個反饋信號與“被命令”方向信號(φCMD)的比較,后者來自中央任務(wù)控制系統(tǒng),或只是代表支持平臺上的設(shè)備理想工作的方向。
應用例子
從架構(gòu)的角度看圖1所示運動控制系統(tǒng)的移動,有價值的定義和觀點也來自對特殊應用的物理屬性的分析??紤]圖2所示的系統(tǒng),它從概念的角度觀察生產(chǎn)線上的自動化檢查系統(tǒng)。這個攝像機系統(tǒng)可以檢查傳送帶上進出視場的物件。在這個方案中,攝像機通過一個長的支架掛接到天花板上。這個支架確定了其高度(見圖2中的“D”),可根據(jù)它要檢查的目標物體大小優(yōu)化其視場。由于工廠中充滿了機械設(shè)備和其它活動,攝像機可能時不時經(jīng)歷擺動(見圖2中的“ωSW(t)”),從而可能導致檢查圖像的失真。
這張圖中的紅色虛線是對來自這種擺動的總角度誤差(±φSW)的放大圖,綠色虛線代表支持系統(tǒng)圖像質(zhì)量目標的角度誤差水平(±φRE)。圖2在檢查物體表面上的線性位移誤差(dSW, dRE)方面定義了關(guān)鍵的系統(tǒng)級指標(圖像失真)。這些屬性通過公式1中簡單的三角函數(shù)與攝像機的高度(D)和角度誤差項(φSW, φRE)建立起了關(guān)系。 20160706A02
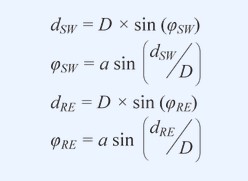
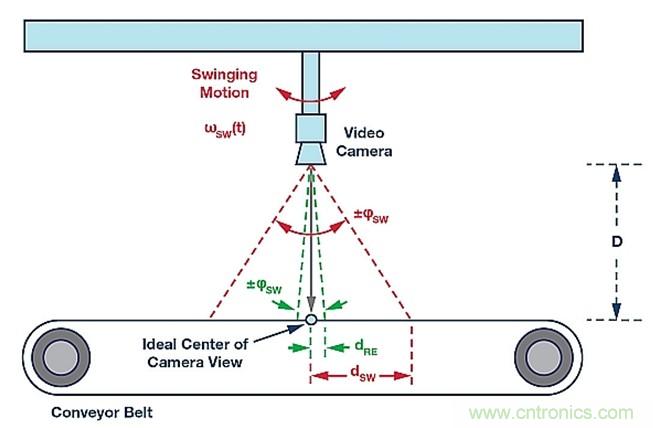
圖2:工業(yè)攝像機檢查系統(tǒng)
針對這種系統(tǒng)的最適用的運動控制技術(shù)被稱為圖像穩(wěn)定技術(shù)。早期的圖像穩(wěn)定系統(tǒng)使用基于陀螺儀的反饋系統(tǒng)來驅(qū)動伺服電機,并在快門打開期間調(diào)整圖像傳感器的方向。MEMS技術(shù)的出現(xiàn)以革命性的方式幫助減小了這些功能的尺寸、成本和功耗,從而使得這種技術(shù)在現(xiàn)代數(shù)碼相機中得到了廣泛使用。數(shù)字圖像處理技術(shù)的發(fā)展(在它們的算法中仍然使用基于MEMS的角速度測量)已經(jīng)導致許多應用取消了伺服電機。
不管圖像穩(wěn)定效果來自于伺服電機還是通過圖像文件的數(shù)字化后處理,陀螺儀的基礎(chǔ)功能(反饋檢測)仍然是一樣的,噪聲結(jié)果也是如此。為了簡單起見,本次討論專注于經(jīng)典方法(在圖像傳感器上使用伺服電機)研究最相關(guān)的噪聲原理,以及它們是如何關(guān)聯(lián)到這類應用最重要的物理屬性的。
角度隨機游走(ARW)
所有MEMS陀螺儀的角速率測量都存在噪聲。這種固有的傳感器噪聲代表陀螺儀工作在靜態(tài)慣性(沒有旋轉(zhuǎn)運動)和環(huán)境條件(沒有振動、沖擊等)下輸出中的隨機變化。MEMS陀螺儀數(shù)據(jù)手冊中描述它們噪聲行為的最常用指標是速度噪聲密度(RND)和角度隨機游走(ARW)。RND參數(shù)一般使用的單位是degrees/sec/√Hz,它根據(jù)陀螺儀的頻率響應從角速度方面提供了預測總噪聲的簡單方法。
ARW參數(shù)一般使用的單位是degrees/√hour,在分析指定時間內(nèi)噪聲對角度估計值的影響時更加有用。公式2提供了根據(jù)角速度測量結(jié)果估計角度的通用公式。另外,它也提供了將RND參數(shù)關(guān)聯(lián)到ARW參數(shù)的簡單公式。這個關(guān)系代表了在IEEE-STD-952-1997(附錄C)基礎(chǔ)上的小改變(單側(cè)與雙側(cè)FFT)。
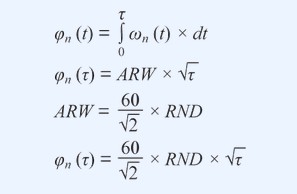
圖3提供了圖形參考,它有助于進一步討論ARW參數(shù)表示的行為。這張圖中的綠色虛線代表陀螺儀的RND等于0.004 degrees/sec/√Hz時的ARW行為,相當于ARW為0.17 degrees/√hour。實線代表這個陀螺儀的輸出在25ms時間內(nèi)的6次單獨積分。角度誤差相對于時間的隨機屬性表明,ARW的基本用途是估計在規(guī)定積分時間內(nèi)角度誤差的統(tǒng)計分布。另外值得注意的是,這種響應假設(shè)使用高通濾波濾除了積分過程中的初始偏置誤差。
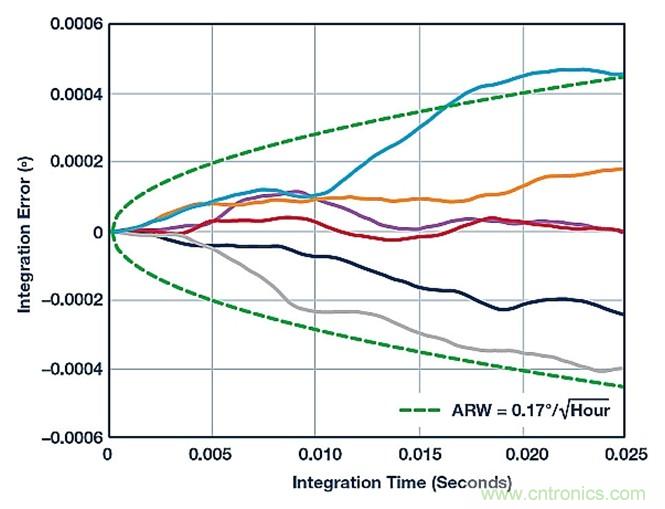
圖3:角度隨機游走(ADIS16460)
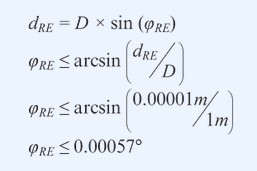
回顧圖2所示的應用例子,將公式1和2組合起來可以將重要標準(檢查表面上的物理失真)關(guān)聯(lián)到MEMS陀螺儀數(shù)據(jù)手冊中常見的噪聲性能指標(RND,ARW)。在這個過程中,假設(shè)公式1的積分時間(τ)等于圖像捕獲時間,這樣可以得到有用的再次簡化。公式3應用公式1的通用關(guān)系來估計當攝像機離檢查表面1米(D)遠以及最大允許失真誤差為10μm (dRE)時,來自陀螺儀的角度誤差必須小于0.00057度。
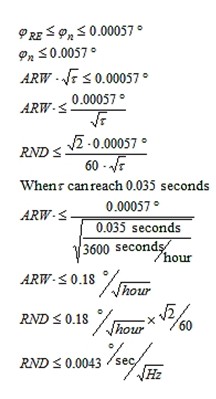
公式4整合了公式3的結(jié)果和公式2中的通用關(guān)系來預測特定情形下對MEMS陀螺儀的ARW和RND要求。這個過程假設(shè)35ms的圖像捕獲時間代表來自公式2的積分時間(τ),進而導致預測陀螺儀的ARW需要小于0.18 degrees/hour1/2,或RND必須小于0.0043 degrees/sec/Hz1/2才能支持這個要求。當然,這可能不是這些參數(shù)支持的唯一要求,但這些簡單的關(guān)系確實提供了如何關(guān)聯(lián)到已知要求和條件的樣例。
角速度噪聲與帶寬
提供連續(xù)指向控制的系統(tǒng)開發(fā)人員可能選擇根據(jù)角速度來評估噪聲影響,因為他們可能沒有固定的積分時間來利用基于ARW的關(guān)系。根據(jù)角速度評估噪聲經(jīng)常要考慮RND參數(shù)和陀螺儀信號鏈中的頻率響應。陀螺儀的頻率響應通常受濾波的影響最大,它支持針對環(huán)路穩(wěn)定標準的特殊應用要求,并能抑制對環(huán)境威脅的不良傳感器反應,比如振動。公式5提供了估計與特定頻率響應(噪聲帶寬)和RND有關(guān)的噪聲的一種簡單方法。
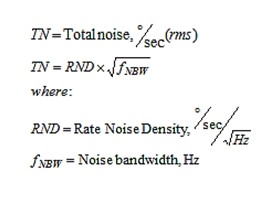
當RND的頻率響應符合單極點或雙極點的低通濾波器規(guī)范時,根據(jù)公式6中的關(guān)系,噪聲帶寬(fNBW)將與濾波器的截止頻率(fC)有關(guān)。 20160706A09 舉例來說,圖4針對RND為0.004 degrees/sec/√Hz的ADXRS290中的噪聲提供了兩個不同的頻譜圖。在這張圖中,黑色曲線代表使用雙極點低通濾波器時的噪聲響應,這個濾波器的截止頻率是200Hz;而藍色曲線代表使用單極點低通濾波器時的噪聲響應,這時的濾波器截止頻率是20Hz。公式7可以用來計算每個濾波器的總噪聲。正如預期的那樣,200Hz版本的噪聲要比20Hz版本高。
舉例來說,圖4針對RND為0.004 degrees/sec/√Hz的ADXRS290中的噪聲提供了兩個不同的頻譜圖。在這張圖中,黑色曲線代表使用雙極點低通濾波器時的噪聲響應,這個濾波器的截止頻率是200Hz;而藍色曲線代表使用單極點低通濾波器時的噪聲響應,這時的濾波器截止頻率是20Hz。公式7可以用來計算每個濾波器的總噪聲。正如預期的那樣,200Hz版本的噪聲要比20Hz版本高。
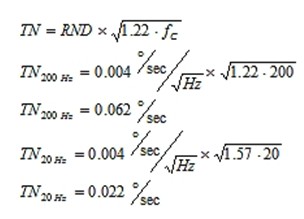
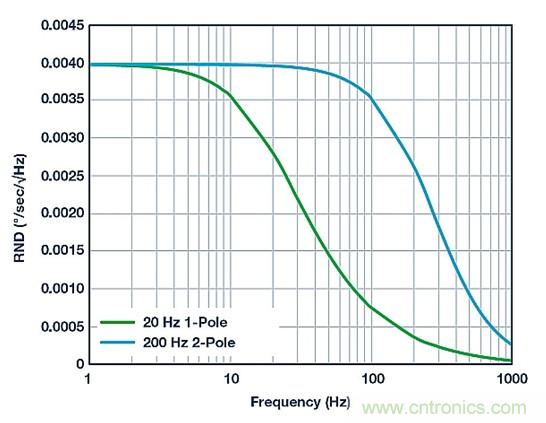
圖4:帶濾波器的ADXRS290噪聲密度
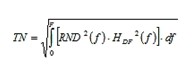
在系統(tǒng)要求定制濾波的場合,其頻率響應(HDF(f))不符合公式6和7中簡單的單極點和雙極點模型,公式8提供了更為通用的關(guān)系來預測總噪聲:
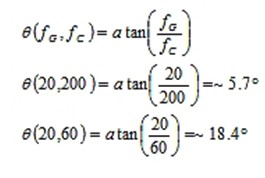
除了影響總的角速度噪聲外,陀螺儀濾波器還會對總的環(huán)路響應產(chǎn)生相位延時,這將直接影響反饋控制系統(tǒng)中的另一個重要的品質(zhì)因數(shù):單位增益交越頻率點的相位余量。公式9提供的公式可以用來估計單極點濾波器(fC =截止頻率)在單位增益交越頻率點(fG)對控制環(huán)路頻率響應造成的相位延時(θ)。公式9中的兩個例子給出了濾波器截止頻率分別是200Hz和60Hz時單位增益交越頻率20Hz點的相位延時。這種對相位余量的影響可能導致規(guī)定陀螺儀的帶寬比單位增益交越頻率高10倍,從而把更多的重點放在選擇具有良好RND水平的MEMS陀螺儀上面。
現(xiàn)代控制系統(tǒng)經(jīng)常使用數(shù)字濾波器,因此在預測控制環(huán)路關(guān)鍵頻率點的相位延時時可能用不同的模型。舉例來說,公式10用于預測與16抽頭FIR濾波器(NTAP)相關(guān)的相位延時(θ),該濾波器運行在ADXRS290的4250 SPS (fS)刷新率條件下,并具有同樣20Hz的單位增益交越頻率(fG)。這種關(guān)系有助于確定在這種濾波器結(jié)構(gòu)下系統(tǒng)架構(gòu)允許的總抽頭數(shù)量。
本文小結(jié)
總之,角速度反饋環(huán)路中的噪聲對運動控制系統(tǒng)中的關(guān)鍵性能標準有直接的影響,因此對一個新系統(tǒng)來說需要在設(shè)計過程的早期加以考慮。那些能夠量化角速度噪聲如何影響系統(tǒng)級行為的人要比只知道需要“低噪聲”的人擁有顯著的優(yōu)勢。他們能夠確立性能目標,并在他們的應用中形成可觀察的值,并且當項目其它目標鼓勵考慮特定MEMS陀螺儀時能夠更好地量化系統(tǒng)級結(jié)果。
一旦基本的理解到位后,系統(tǒng)設(shè)計師就能專注于確定能夠滿足他們性能要求的MEMS陀螺儀,并使用帶寬、速度噪聲密度(RND)或角度隨機游走(ARW)指標來指導他們的想法。當他們需要優(yōu)化從所選的傳感器認識到的噪聲性能時,他們能夠使用與帶寬(角速率噪聲)和積分時間(角度誤差)的關(guān)系來形成其它重要的系統(tǒng)級定義,進而支持最適合的應用性能。
【推薦閱讀】


