

【導(dǎo)讀】電源的拓撲結(jié)構(gòu)有多種,各有所長也各有所短,本篇文章講詳細解析“電壓模式”、“遲滯”和“基于遲滯”等三種主要的電源控制拓撲各有優(yōu)劣。方便工程師選擇最優(yōu)方案。
每一位電源工程師都熟知并學(xué)習(xí)過電壓模式和電流模式控制這些傳統(tǒng)的控制拓撲,但卻不太了解基于遲滯的拓撲及其優(yōu)勢。雖然純遲滯控制對于諸如醫(yī)療或工業(yè)自動化等特定應(yīng)用可能并不實用,然而許多比較新的電源拓撲都是基于遲滯的,并且擁有旨在克服純遲滯控制的缺陷的額外特性。此類拓撲被運用于從處理器內(nèi)核供電到汽車系統(tǒng)等廣泛領(lǐng)域。
幾乎所有的電源均是專為提供一個穩(wěn)定的輸出電壓或電流而設(shè)計的。提供這種輸出調(diào)節(jié)功能需要一個閉環(huán)系統(tǒng)和即將被調(diào)節(jié)的輸出電壓或電流的反饋。盡管有很多種用于對可用反饋環(huán)路進行補償?shù)牟煌刂仆負洌鼈兺ǔ6伎梢员粴w為兩類:脈寬調(diào)制(PWM)或遲滯。在這兩種基本拓撲的基礎(chǔ)上演變出了第三種拓撲,其為此二者的融合:基于遲滯的拓撲。針對不同的應(yīng)用,這些控制拓撲各有優(yōu)缺點。
電壓模式控制
脈寬調(diào)制(PWM)控制被歸為兩種基本類型:電壓模式和電流模式。為簡單起見,本文只討論采用輸入電壓前饋的電壓模式控制。有關(guān)電壓模式與電流模式更為詳細的比較,圖1示出了降壓轉(zhuǎn)換器中電壓模式控制的基本方框圖。
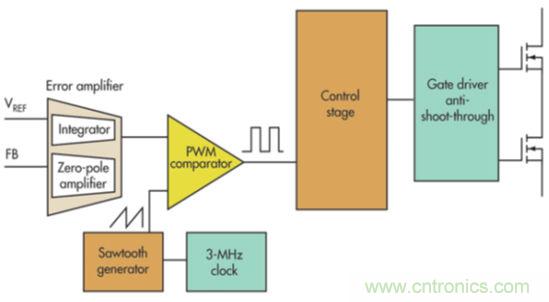
圖1:電壓模式控制包括了誤差放大器、時鐘和內(nèi)部基準電壓(VREF)
當(dāng)采用電壓模式控制來調(diào)節(jié)輸出電壓時,它通過一個連接至其反饋(FB)輸入的阻性分壓器來檢測輸出電壓的縮小版。具有高增益的誤差放大器隨后將該FB信號與一個高準確度內(nèi)部基準電壓進行比較。圍繞誤差放大器的環(huán)路補償電路負責(zé)保持系統(tǒng)的穩(wěn)定。
電壓模式控制擁有諸多的優(yōu)勢。通過僅調(diào)節(jié)輸出電壓和其他良好受控的內(nèi)部信號(比如:時鐘和內(nèi)部基準電壓),該拓撲具備非常強的抗噪聲能力。而且它還相當(dāng)?shù)睾唵蚊髁?。利用輸入電壓前饋保持了簡單性,以在不斷變化的輸入電壓條件下維持恒定的環(huán)路增益。此外,輸入電壓前饋還可大幅改善針對線路電壓瞬變的響應(yīng)。最后,時鐘實現(xiàn)了開關(guān)頻率的控制,包括使電路同步至一個外部時鐘源的可能性。
電壓模式控制的主要劣勢是必需的環(huán)路補償及對應(yīng)的環(huán)路帶寬限制。就其本質(zhì)而言,電壓模式控制在功率級中引入了一個雙極點,該雙極點位于輸出濾波器的轉(zhuǎn)折頻率,因而需要在誤差放大器的周圍布設(shè)兩個正確定位的零點。由于該雙極點的頻率通常很低,因而環(huán)路帶寬被限制在較低的水平。一般情況下,其被限制為不超過開關(guān)頻率的1/10。這對電源的瞬態(tài)響應(yīng)產(chǎn)生了顯著的負面影響。因此,設(shè)計人員必須通過增加輸出電容來獲得更好的瞬態(tài)結(jié)果,從而導(dǎo)致系統(tǒng)成本升高。
考慮到以上的利弊權(quán)衡,電壓模式控制仍然是頗具價值的,尤其在那些對噪聲敏感的應(yīng)用中。電壓模式控制的高噪聲耐受性及其可同步至一個系統(tǒng)時鐘的能力使其很適合于對噪聲最為敏感的應(yīng)用,例如:醫(yī)療和儀表設(shè)備等。[page]
遲滯控制
純粹和基本形式的遲滯控制是極其簡單的,所有控制拓撲中最簡單的一種(圖2)。在其端子之間具有某些小遲滯的比較器通過FB輸入將輸出電壓直接與高準確度的內(nèi)部基準電壓VREF進行比較。
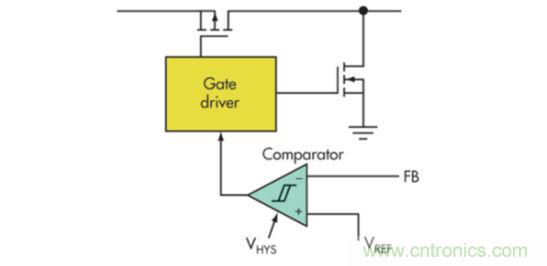
圖2:簡單的遲滯控制拓撲只需一個比較器和內(nèi)部VREF
這種直接控制輸出電壓的優(yōu)勢在于控制環(huán)路的速度。當(dāng)輸出電壓由于瞬變的原因而發(fā)生變化時,控制環(huán)路開始做出反應(yīng)所需的時間僅受限于比較器和柵極驅(qū)動器中的傳播延遲。誤差信號不必穿過低帶寬誤差放大器。因此,遲滯拓撲是速度最快的控制拓撲。
此外,其工作原理的簡單性還使其能在無需任何環(huán)路補償?shù)那闆r下保持固有的穩(wěn)定性。而且這種簡單性也使之成為一種低成本的拓撲。在電源中沒有需要設(shè)計、構(gòu)建和測試的振蕩器或誤差放大器??刂崎_關(guān)動作僅需一個基本的比較器即可。
遲滯拓撲的主要缺陷是其開關(guān)頻率變化。沒有負責(zé)設(shè)定開關(guān)頻率的時鐘或同步信號。取而代之的是,開關(guān)頻率由遲滯量以及外部組件和工作條件來設(shè)定。
當(dāng)采用純遲滯轉(zhuǎn)換器時,預(yù)計在輸入電壓和負載范圍內(nèi)將發(fā)生很大的頻率變化。而且,如果不采用一個高增益誤差放大器的話,所實現(xiàn)的輸出電壓的DC設(shè)定點有可能不如采用電壓模式控制時那么精準。最后,遲滯控制需要利用輸出電容器中的等效串聯(lián)電阻(ESR)。因此,當(dāng)運用純遲滯拓撲時,一般不能使用ESR極小的陶瓷輸出電容器。
但是,在某些低功率、非常低成本的應(yīng)用中(比如:玩具),由于此類終端設(shè)備的價位非常之低,而且其低功率在遲滯電源的寬開關(guān)頻率范圍內(nèi)產(chǎn)生的電磁干擾(EMI)水平很低,因此遲滯轉(zhuǎn)換器也許是可以接受的。另外,具有非常嚴酷之瞬變的系統(tǒng)需要采用遲滯或基于遲滯的拓撲來維持可接受的輸出電壓調(diào)節(jié)。假如這些系統(tǒng)的輸入電壓、輸出電壓和其他工作條件處于良好受控的狀態(tài),則開關(guān)頻率被保持在一個可接受的范圍之內(nèi)。這使得遲滯控制成為那些依靠一個固定輸入電壓運作并產(chǎn)生一個固定輸出電壓的應(yīng)用的有效選擇。
基于遲滯的控制
許多控制拓撲從根本上說都是遲滯的,但其包含了其他旨在克服頻率變化和其他純遲滯拓撲局限性的電路。例如,它們包括D-CAP、D-CAP2、COT、具有ERM的COT和DCS-Control拓撲。本文僅分析和比較DCS-Control4及相似器件。
根本上說,DCS-Control(采用至節(jié)能模式的無縫轉(zhuǎn)換的直接控制)是一種遲滯拓撲,但其融合了電壓模式和電流模式的某些特性(圖3)。和在電壓模式控制中一樣,遲滯比較器將一個誤差放大器的輸出與一個鋸齒波形進行比較。
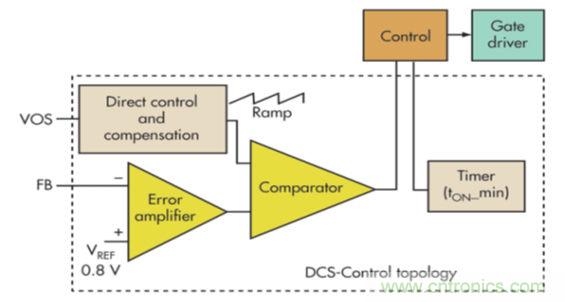
圖3:在基于遲滯的DCS-Control拓撲中,誤差放大器和內(nèi)部VREF與電壓模式控制中的相同,而遲滯比較器則取自遲滯拓撲。導(dǎo)通定時器(ontimer)是基于遲滯的拓撲所特有的
[page]
該鋸齒波并非產(chǎn)生自某個時鐘,而是通過一個與輸出電壓直接相連的特殊電路產(chǎn)生在VOS輸入引腳上。實質(zhì)上,遲滯比較器仍然具有一個通過該VOS引腳至輸出電壓的直接連接,并接入了一個高增益誤差放大器以提供非常優(yōu)良的輸出電壓設(shè)定點準確度。
除了將取自遲滯和電壓模式拓撲的遲滯比較器與誤差放大器加以組合之外,DCS-Control還運用了一種導(dǎo)通時間電路以控制開關(guān)頻率。最后,內(nèi)置了必需的環(huán)路補償功能電路以實現(xiàn)穩(wěn)定性。
DCS-Control的主要優(yōu)點是可保持遲滯轉(zhuǎn)換器非??斓乃矐B(tài)響應(yīng)以及電壓模式轉(zhuǎn)換器的輸出電壓準確度,同時克服了這兩種拓撲其他的關(guān)鍵缺陷,即:緩慢的響應(yīng)時間、有限的控制環(huán)路帶寬和頻率變化。
由于VOS引腳提供了輸出電壓的直接控制,因此輸出電壓的任何變化都將直接通過控制環(huán)路傳播,而不會受到誤差放大器帶寬的限制。這將大大加快瞬態(tài)響應(yīng)速度。
就目前的DCS-Control實施方案而言,其主要缺點是無法同步至一個時鐘。作為一種基于遲滯的拓撲,其并未提供時鐘輸入信號,而是提供了一個在各種工作條件下變化極小的受控開關(guān)頻率。在某些場合中,該變化小于電壓模式轉(zhuǎn)換器的時鐘頻率容差。
諸如DCS-Control等基于遲滯的拓撲其最佳的使用場合是那些會遭遇大的瞬變并需要極高輸出電壓準確度的應(yīng)用。此類應(yīng)用包括為嵌入式或計算系統(tǒng)中的處理器內(nèi)核供電,以及工業(yè)自動化和汽車信息娛樂系統(tǒng)。
結(jié)論
對于不同的應(yīng)用,“電壓模式”、“遲滯”和“基于遲滯”等三種主要的電源控制拓撲各有優(yōu)劣。雖然大多數(shù)電源工程師都習(xí)慣并樂于使用電壓模式控制,但遲滯和基于遲滯的拓撲卻能提供同類最佳的瞬態(tài)響應(yīng),而且應(yīng)當(dāng)就諸如處理器內(nèi)核供電等需要這種快速響應(yīng)速度的應(yīng)用對其做深入探究。由于每種控制拓撲都有數(shù)量極為龐大的設(shè)備在使用,因此意味著對于幾乎所有的應(yīng)用而言都很可能有一種最優(yōu)的電源解決方案。
無論哪一種電源的拓撲結(jié)構(gòu)都有優(yōu)勢和劣勢,熟知每一種拓撲結(jié)構(gòu)的應(yīng)用領(lǐng)域會幫助工程師在不同的領(lǐng)域選擇不同的方案,提高效率,節(jié)約成本。


