

【導(dǎo)讀】當(dāng)考慮使用何種柵極驅(qū)動(dòng)器時(shí),一個(gè)常見問題是:驅(qū)動(dòng)器可以提供的峰值電流是多少?峰值電流是柵極驅(qū)動(dòng)器數(shù)據(jù)手冊(cè)中最重要的參數(shù)之一。此指標(biāo)一般被視為決定柵極驅(qū)動(dòng)器驅(qū)動(dòng)強(qiáng)度的終極因素。MOSFET/IGBT的導(dǎo)通、關(guān)斷時(shí)間與柵極驅(qū)動(dòng)器可以提供的電流有關(guān),但并不能說明全部問題。峰值電流一詞在業(yè)界使用非常普遍,許多柵極驅(qū)動(dòng)器數(shù)據(jù)手冊(cè)的標(biāo)題中包含這一術(shù)語(yǔ)。盡管如此,其定義還是會(huì)因器件而異。本文討論為特定應(yīng)用選擇柵極驅(qū)動(dòng)器時(shí)使用峰值電流作為決定性因素的問題,并比較數(shù)據(jù)手冊(cè)中一些較常見的峰值電流表示形式。本文對(duì)標(biāo)題中峰值電流數(shù)值相似的柵極驅(qū)動(dòng)器進(jìn)行了比較,并對(duì)柵極驅(qū)動(dòng)強(qiáng)度做了討論。
應(yīng)用示例
隔離式柵極驅(qū)動(dòng)器提供電平轉(zhuǎn)換、隔離和柵極驅(qū)動(dòng)強(qiáng)度,從而操作功率器件。這些柵極驅(qū)動(dòng)器的隔離特性支持高端和低端器件驅(qū)動(dòng);如果使用合適的器件,它還能提供安全柵。應(yīng)用實(shí)例如圖1所示。VDD1和VDD2有單獨(dú)的地基準(zhǔn),并且各自的電壓可能不同。在本文中,引腳1至引腳3被稱為原邊,引腳4到引腳6被稱為副邊。柵極驅(qū)動(dòng)器提供的隔離很容易達(dá)到數(shù)百伏,因而可以支持較高的系統(tǒng)總線電壓。
合適的隔離式柵極驅(qū)動(dòng)器必須能夠再現(xiàn)原邊上存在的時(shí)序,并以足夠快的速度驅(qū)動(dòng)功率器件的柵極,以使開關(guān)轉(zhuǎn)換可以達(dá)到要求。較快的開關(guān)轉(zhuǎn)換可以降低開關(guān)損耗,因此快速開關(guān)的能力常常是人們所追求的特性。通常,對(duì)于一類開關(guān)技術(shù),功率器件可以處理的功率越大,它給柵極驅(qū)動(dòng)器帶來的負(fù)載就越大。
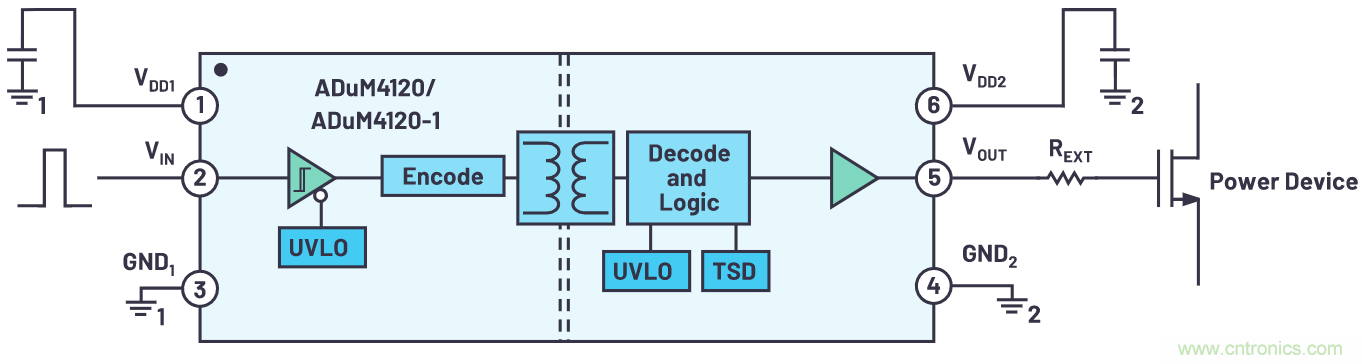
圖1.ADuM4120的典型應(yīng)用。
隔離式柵極驅(qū)動(dòng)器常常用于半橋配置,如圖2所示。高端驅(qū)動(dòng)器必須能夠在系統(tǒng)地和VBUS電壓之間擺動(dòng),同時(shí)為其驅(qū)動(dòng)的功率器件提供必要的驅(qū)動(dòng)強(qiáng)度。
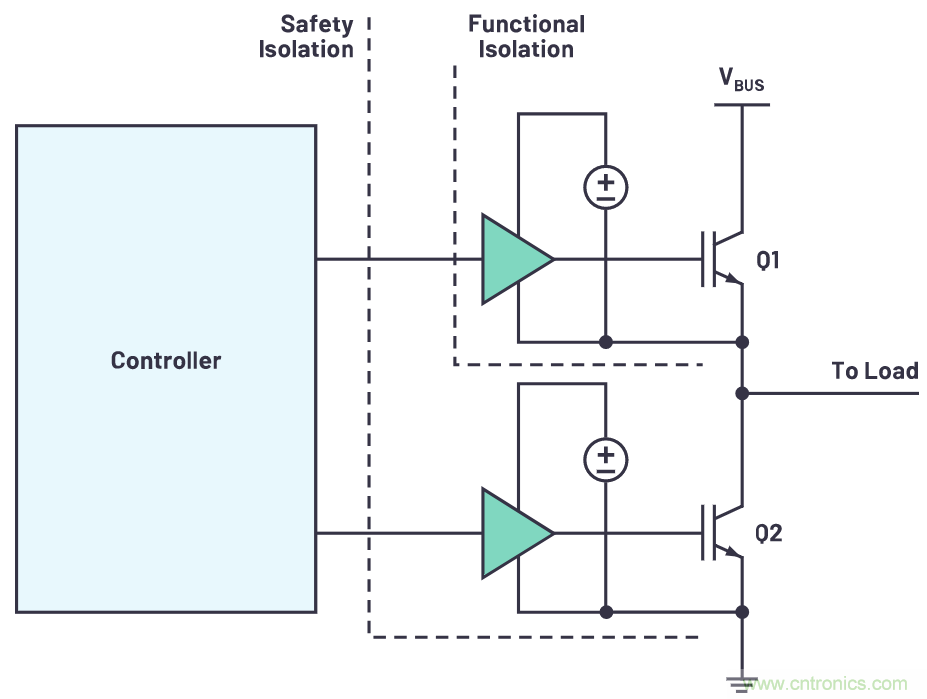
圖2.典型半橋應(yīng)用。
負(fù)載考慮
MOSFET/IGBT的柵極充電或放電所需的時(shí)間決定了器件的開關(guān)速度。實(shí)際使用中會(huì)增加一個(gè)外部串聯(lián)柵極電阻,以便調(diào)節(jié)柵極電壓的上升/下降時(shí)間,并可以限制柵極驅(qū)動(dòng)器IC的功耗。將功率器件建模為一個(gè)電容和帶MOSFET輸出級(jí)的柵極驅(qū)動(dòng)器,并通過外部串聯(lián)柵極電阻運(yùn)行,我們便得到圖3所示的RC電路。在此簡(jiǎn)化模型中,峰值拉電流方程為IPK_SRC = VDD/(RDS(ON)_P + REXT),峰值灌電流方程為IPK_SNK = VDD/(RDS(ON)_N + REXT)。對(duì)于短路峰值電流測(cè)量, REXT設(shè)置為0Ω,但在應(yīng)用中,存在一個(gè)外部串聯(lián)電阻。
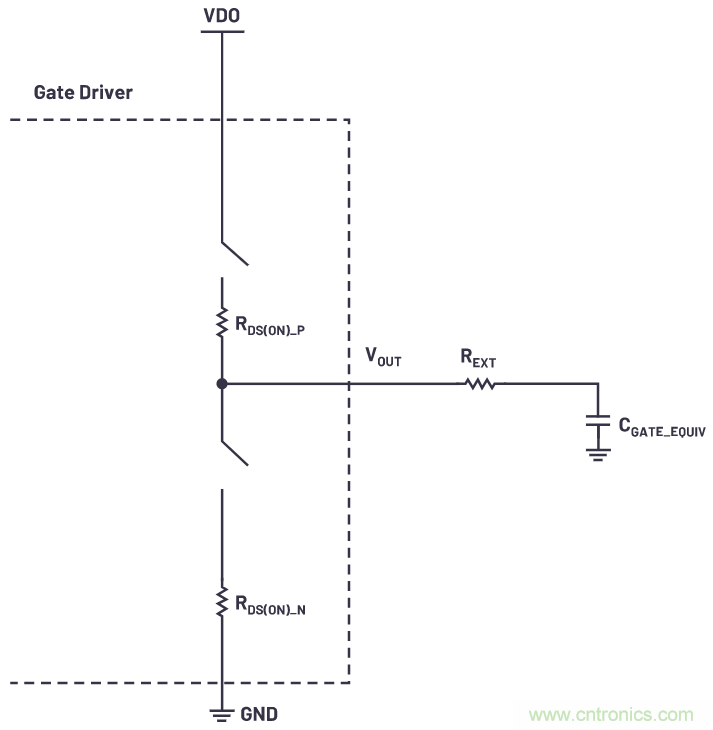
圖3.柵極充放電的簡(jiǎn)化RC模型。
其中:
RDS(ON)_N 為柵極驅(qū)動(dòng)器NMOS的導(dǎo)通電阻。
RDS(ON)_P 為柵極驅(qū)動(dòng)器PMOS的導(dǎo)通電阻。
REXT為外部串聯(lián)柵極電阻。
CGATE_EQUIV 為功率器件的等效電容。
數(shù)據(jù)手冊(cè)標(biāo)題中的一語(yǔ)多義
峰值電流的本來作用是簡(jiǎn)明地比較柵極驅(qū)動(dòng)強(qiáng)度,但不同廠商的數(shù)值不同。圖4顯示了I-V曲線表示,以及柵極驅(qū)動(dòng)器制造商用來給出峰值電流值的一些常見電平。特定MOSFET的I-V曲線的飽和水平在整個(gè)硅工藝和溫度范圍內(nèi)變化很大,變化幅度常常是典型值的±2倍。
在許多數(shù)據(jù)手冊(cè)中,數(shù)據(jù)手冊(cè)特別提到的峰值電流是典型飽和電流,其測(cè)量方法是將輸出短路至相對(duì)較大的電容,或通過脈沖讓驅(qū)動(dòng)器在非常短的時(shí)間短路。很少有數(shù)據(jù)手冊(cè)清楚地表明輸出驅(qū)動(dòng)器在整個(gè)溫度和工藝變化范圍內(nèi)的最小和最大IV曲線,但如果使用典型飽和數(shù)值作為峰值電流值,那么有些器件將無法在實(shí)際應(yīng)用中提供或吸收那么多電流。有些數(shù)據(jù)手冊(cè)給出最大飽和值,有些則給出最小飽和值。描述驅(qū)動(dòng)器可用峰值電流的另一種方法是描述最低I-V曲線的線性區(qū)域中的最高電流或最小線性電流。明確該數(shù)值后,用戶便知道所有器件在應(yīng)用中都能提供或吸收比該額定值更多的電流。此值是保守值,但用戶可以得知,通過適當(dāng)選擇外部串聯(lián)柵極電阻的大小,柵極驅(qū)動(dòng)器輸出FET將不會(huì)因溫度和工藝變化而處于飽和區(qū)域。
峰值電流的生產(chǎn)測(cè)試通常非常困難,因?yàn)闇y(cè)試環(huán)境中接觸器的電流受限。隔離式柵極驅(qū)動(dòng)器的峰值電流規(guī)格通過設(shè)計(jì)和/或特性來保證并不罕見。不同制造商可能會(huì)也可能不會(huì)提及峰值電流的最小值或最大值。因此,對(duì)于使用峰值電流的哪種表示方式來比較不同器件并沒有達(dá)成共識(shí)。重要的是應(yīng)注意,峰值電流不是恒定電流或平均電流。如果柵極驅(qū)動(dòng)器輸出在輸出FET的線性區(qū)域中正常運(yùn)行,則峰值電流僅在切換剛開始時(shí)存在。
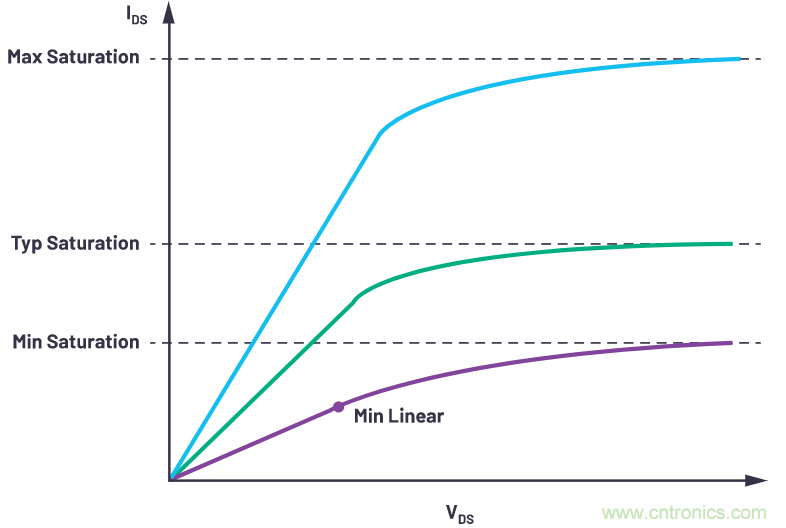
圖4.輸出驅(qū)動(dòng)器FET的I-V曲線示例。
雖然整個(gè)溫度和工藝變化范圍內(nèi)的完整最小和最大飽和曲線幾乎永遠(yuǎn)不會(huì)進(jìn)入數(shù)據(jù)手冊(cè),但一些隔離式柵極驅(qū)動(dòng)器制造商會(huì)提供輸出驅(qū)動(dòng)器的典型I-V曲線。這可以表示為短路I-V曲線,或采用外部串聯(lián)柵極電阻來表示,以便更好地模擬實(shí)際應(yīng)用。查看包含外部串聯(lián)電阻的IV曲線時(shí),電壓軸通常在副邊電壓中指定,這意味著繪制的電壓是內(nèi)部RDS(ON)和外部串聯(lián)柵極電阻上共享的VDD2電壓。
圖5顯示了數(shù)據(jù)手冊(cè)中給出的 ADuM4121 典型I-V曲線。應(yīng)當(dāng)注意的是,ADuM4121在數(shù)據(jù)手冊(cè)標(biāo)題中提到了2 A的驅(qū)動(dòng)能力,但其典型飽和電流超過7A。這是因?yàn)樵摂?shù)據(jù)手冊(cè)的標(biāo)題使用了峰值電流的保守定義,告訴用戶該器件絕對(duì)可以在所有溫度和工藝變化下提供2 A電流。該I-V曲線也是采用2Ω外部串聯(lián)柵極電阻來模擬實(shí)際應(yīng)用性能。重要的是確保用戶在對(duì)比不同產(chǎn)品時(shí),每個(gè)產(chǎn)品的峰值電流定義是相同的,否則比對(duì)時(shí)可能會(huì)遺漏關(guān)鍵因素。
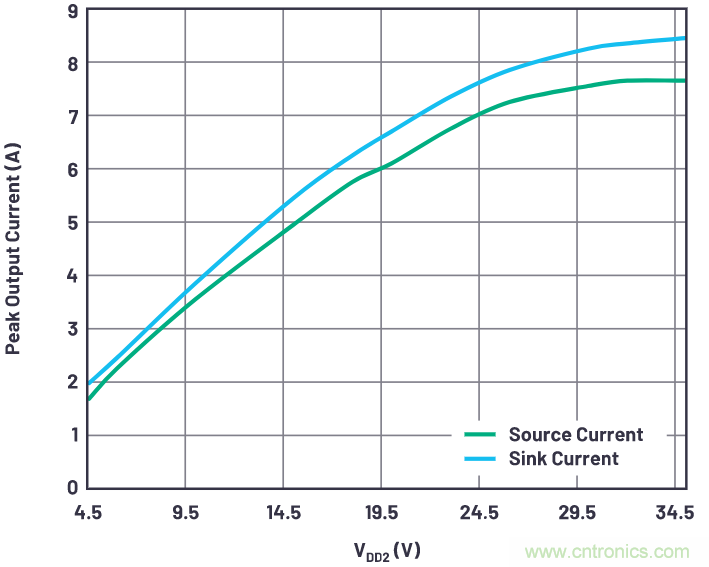
圖5.ADuM4121數(shù)據(jù)手冊(cè)I-V曲線。
米勒電容
MOSFET或IGBT雖然大致表現(xiàn)為容性負(fù)載,但存在非線性,原因是動(dòng)態(tài)柵極-漏極電容,由此產(chǎn)生米勒平坦區(qū)——在該區(qū)域中,電容在導(dǎo)通(圖6)和關(guān)斷過渡期間會(huì)發(fā)生變化。在該米勒平坦區(qū)間隔期間,柵極電容需要最多的充電電流。峰值電流數(shù)值未考慮此時(shí)的電流值。但是,較高的峰值電流意味著米勒平坦區(qū)中的電流通常會(huì)更大。
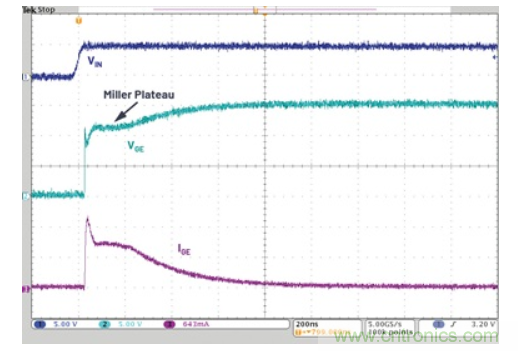
圖6.IGBT的導(dǎo)通轉(zhuǎn)換,顯示出米勒平坦區(qū)。
功耗:一個(gè)主要考慮因素
In order to charge and discharge the gate of a power device, energy must be expended. If the equivalent capacitance model is used, and full charging and discharging of the gate occurs each switching cycle, the power dissipated by the gate switching action for both isolated and nonisolated gate drivers is:
其中:
PDISS 為一個(gè)柵極切換周期中消耗的功率。
CEQ為等效柵極電容。
VDD2 為功率器件柵極的總電壓擺幅。
QG_TOT 為功率器件的總柵極電荷。
fS為系統(tǒng)的開關(guān)頻率。
重要的是應(yīng)注意,等效柵極電容CEQ與功率器件數(shù)據(jù)手冊(cè)中的CISS不是一回事。它常常比CISS大3到5倍,而總柵極電荷QG_TOT是一個(gè)更準(zhǔn)確的數(shù)值,可供使用。還應(yīng)注意的是,該方程式中未出現(xiàn)充電和放電的串聯(lián)電阻,原因是它僅與開關(guān)動(dòng)作的總功耗有關(guān),而與柵極驅(qū)動(dòng)器IC內(nèi)部的功耗無關(guān)。
由于隔離式柵極驅(qū)動(dòng)器的隔離特性,標(biāo)準(zhǔn)要求不同的隔離區(qū)通過足夠的爬電距離和電氣間隙距離分開。爬電距離和電氣間隙距離要減去原邊到副邊區(qū)域路徑中的任何電流導(dǎo)體,因此,很少看到隔離式柵極驅(qū)動(dòng)器使用裸露焊盤或散熱塊。這意味著無法使用一種主要的幫助降低集成電路熱阻的方法,導(dǎo)致將功耗轉(zhuǎn)移到隔離式柵極驅(qū)動(dòng)器封裝之外(使得在給定工作點(diǎn)時(shí)環(huán)境工作溫度可以更高)的重要性更高。
由于無法給隔離式柵極驅(qū)動(dòng)器添加散熱塊,因此所用封裝的熱阻大致與引腳數(shù)、內(nèi)部金屬化、引線框架連接和封裝尺寸相關(guān)。對(duì)于給定產(chǎn)品型號(hào)的隔離式柵極驅(qū)動(dòng)器,當(dāng)比較不同可用器件時(shí),封裝尺寸、引腳數(shù)和引腳排列通常相同,所以不同器件的θJA數(shù)值大致相同。
柵極驅(qū)動(dòng)器IC內(nèi)的熱耗散是導(dǎo)致內(nèi)部結(jié)溫升高的原因。式1中計(jì)算出的功耗是功率器件柵極接通和關(guān)斷的總功耗。柵極驅(qū)動(dòng)器IC內(nèi)的功耗在輸出驅(qū)動(dòng)FET的內(nèi)部電阻RDS(ON)_N和RDS(ON)_P與外部串聯(lián)柵極電阻REXT之間分配。如果柵極驅(qū)動(dòng)器大部分時(shí)候在線性區(qū)域工作,則柵極驅(qū)動(dòng)器IC經(jīng)歷的功耗比為:
如果RDS(ON)_N = RDS(ON)_P = RDS(ON),式2可簡(jiǎn)化為:
因此,柵極驅(qū)動(dòng)器IC從功率器件切換中獲得的總功率等于式1乘以式3:
從式4可以看出,RDS(ON)越小,隔離式柵極驅(qū)動(dòng)器的功耗部分也越小。如果要滿足所需的上升/下降時(shí)間,則應(yīng)保留用于功率器件柵極充放電的RC常數(shù)。RC常數(shù)中的電阻是內(nèi)部RDS(ON)和外部串聯(lián)柵極電阻的串聯(lián)組合。換句話說,如果應(yīng)用中使用的兩個(gè)競(jìng)爭(zhēng)驅(qū)動(dòng)器具有相同的上升和下降速度,則RDS(ON)較低的驅(qū)動(dòng)器可以使用更大的外部串聯(lián)柵極電阻,而總串聯(lián)電阻保持不變,意味著柵極驅(qū)動(dòng)器IC本身的功耗更低。
比較案例研究
為了說明不同產(chǎn)品的峰值電流定義有何差異,并展示隔離式柵極驅(qū)動(dòng)器中較低RDS(ON)的好處,我們選擇了三款隔離式半橋驅(qū)動(dòng)器,其手冊(cè)中均提到了4A峰值電流。所有三個(gè)驅(qū)動(dòng)器的爬電距離、電氣間隙、引腳排列和焊盤圖形都相似。因此,可以使用相同布局來測(cè)試所有三個(gè)器件。使用ADuM4221 評(píng)估板作為測(cè)試平臺(tái)來比較ADuM4221和另外兩個(gè)器件,分別稱為競(jìng)爭(zhēng)產(chǎn)品1和競(jìng)爭(zhēng)產(chǎn)品2。評(píng)估板如圖7所示。

圖7.ADuM4221評(píng)估板。
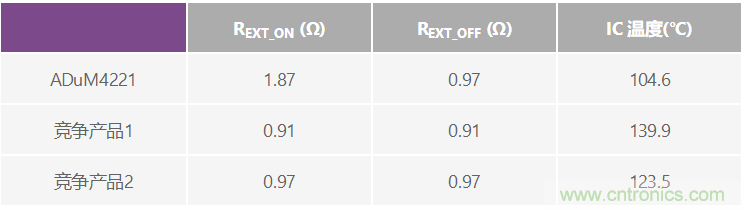
表1總結(jié)了每種器件的數(shù)據(jù)手冊(cè)聲稱的數(shù)值。
表1.數(shù)據(jù)手冊(cè)聲稱值比較

如果嚴(yán)格比較數(shù)據(jù)手冊(cè)中顯示的值,競(jìng)爭(zhēng)產(chǎn)品2提供的柵極驅(qū)動(dòng)看起來最強(qiáng),因此對(duì)于給定負(fù)載,其上升和下降時(shí)間最快。為簡(jiǎn)化分析,負(fù)載使用分立陶瓷電容,故波形中不存在米勒平坦區(qū)。此外,僅使用雙通道輸出驅(qū)動(dòng)器的一路輸出。
對(duì)于第一個(gè)測(cè)試條件,每個(gè)驅(qū)動(dòng)器的負(fù)載為100 nF電容和0.5Ω外部串聯(lián)柵極電阻,配置如圖3所示。在驅(qū)動(dòng)器上執(zhí)行一次導(dǎo)通和關(guān)斷操作,以使驅(qū)動(dòng)器內(nèi)部的功耗保持較低。該測(cè)試非常類似于峰值短路測(cè)試。結(jié)果如圖8和圖9所示。
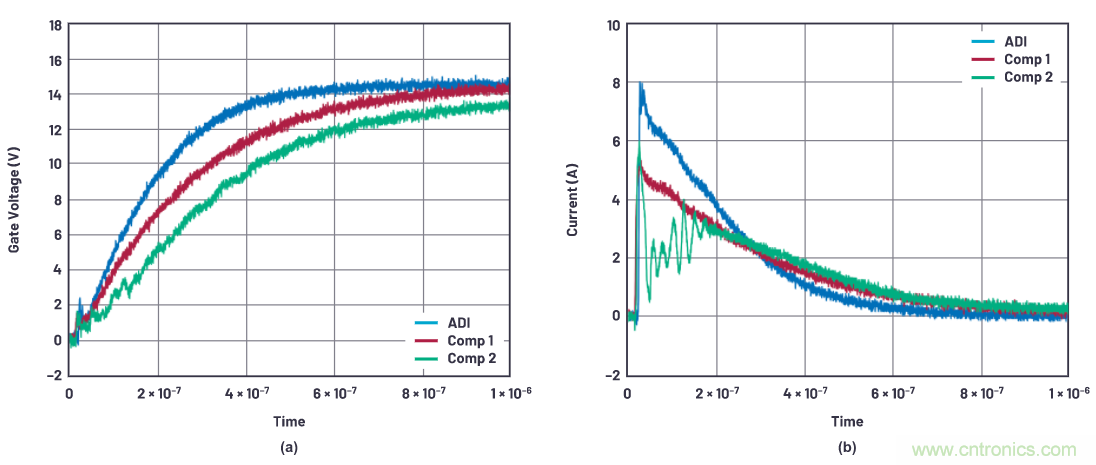
圖8.導(dǎo)通測(cè)試。100 nF和0.5Ω REXT。(a) 電壓與時(shí)間的關(guān)系。(b) 電流與時(shí)間的關(guān)系。
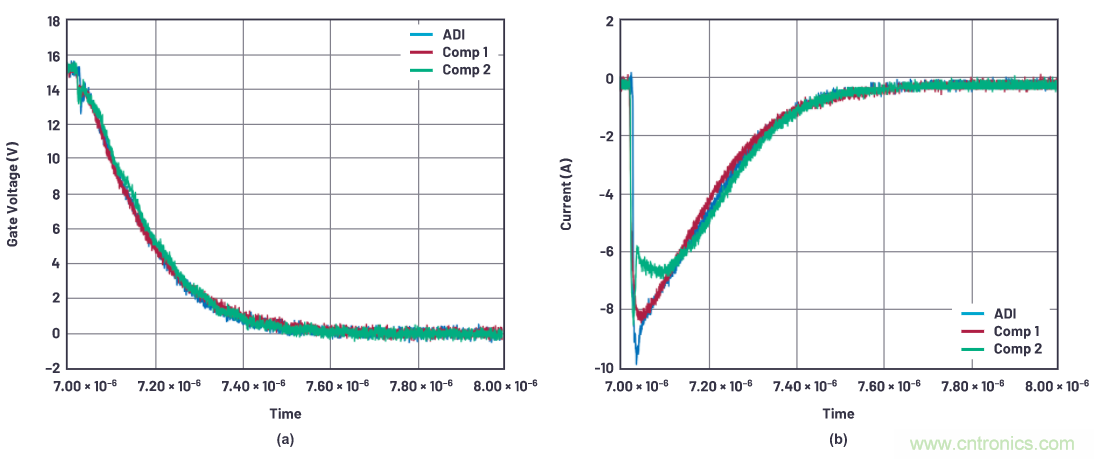
圖9.關(guān)斷測(cè)試。100 nF和0.5Ω REXT。(a) 電壓與時(shí)間的關(guān)系。(b) 電流與時(shí)間的關(guān)系。
圖8表明,不同驅(qū)動(dòng)器的導(dǎo)通速度存在很大差異。令人驚訝的是,市場(chǎng)上峰值電流最高的驅(qū)動(dòng)器的上升時(shí)間最慢。電流波形表明,所有驅(qū)動(dòng)器的輸出都超過了標(biāo)定的電流值,但競(jìng)爭(zhēng)產(chǎn)品2不能維持高電流。總上升時(shí)間是電流積分的函數(shù)。檢查圖9所示的下降時(shí)間,所有三個(gè)器件的表現(xiàn)旗鼓相當(dāng)。盡管各產(chǎn)品的峰值電流相似,但競(jìng)爭(zhēng)產(chǎn)品2的持續(xù)電流最低??傮w而言,三個(gè)器件在關(guān)斷測(cè)試中表現(xiàn)相似。從該測(cè)試可以看到,數(shù)據(jù)手冊(cè)中的峰值電流數(shù)值更強(qiáng)的器件,其表現(xiàn)出的驅(qū)動(dòng)強(qiáng)度低于其他器件。
第二個(gè)測(cè)試條件是調(diào)整所有三個(gè)驅(qū)動(dòng)器,使其上升和下降時(shí)間相似,然后以恒定的開關(guān)頻率操作這些器件以評(píng)估熱性能。如圖8所示,ADuM4221的上升時(shí)間最快,可以使用較大的外部串聯(lián)柵極電阻以與其他驅(qū)動(dòng)器的上升時(shí)間一致。結(jié)果發(fā)現(xiàn),針對(duì)導(dǎo)通情況,與競(jìng)爭(zhēng)產(chǎn)品1的0.91Ω和競(jìng)爭(zhēng)產(chǎn)品2的0.97Ω外部串聯(lián)柵極電阻相比,1.87Ω外部串聯(lián)柵極電阻可以使ADuM4221具有相似的上升和下降時(shí)間。ADuM4221的關(guān)斷電阻調(diào)整至0.97Ω。輸入和輸出波形如圖10所示。

圖10.所有三個(gè)驅(qū)動(dòng)器調(diào)整后的上升/下降曲線。通道1 = 輸入,通道2 = ADuM4221,通道3 = 競(jìng)爭(zhēng)產(chǎn)品1,通道4 = 競(jìng)爭(zhēng)產(chǎn)品2。
將上升時(shí)間和下降時(shí)間調(diào)至相等時(shí),電流波形的積分是可以比較的,功率器件中的開關(guān)損耗在應(yīng)用中也是可以比較的。通過使用較大的外部串聯(lián)柵極電阻,隔離式柵極驅(qū)動(dòng)器外部可以承擔(dān)更多的熱負(fù)載。圖11、圖12和圖13顯示了三個(gè)驅(qū)動(dòng)器在相同環(huán)境溫度下工作時(shí)的熱分布圖,開關(guān)頻率為100 kHz,副邊電壓為15 V,負(fù)載電容為100 nF。
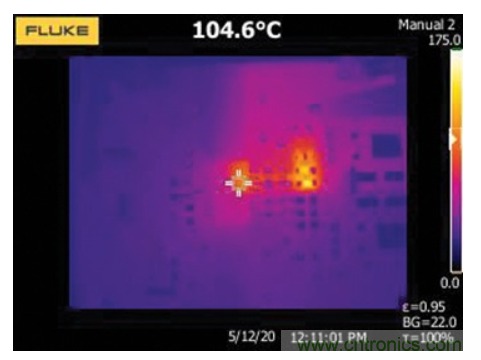
圖11.ADuM4221熱分布圖。
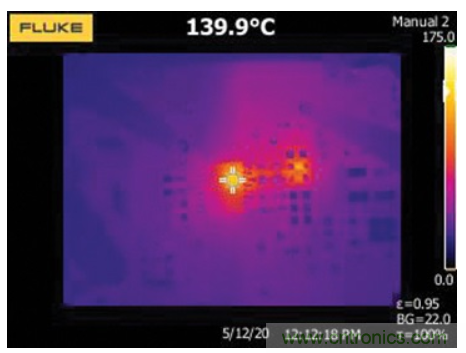
圖12.競(jìng)爭(zhēng)產(chǎn)品1的熱分布圖。

圖13.競(jìng)爭(zhēng)產(chǎn)品2的熱分布圖。
熱像儀的十字線是隔離式柵極驅(qū)動(dòng)器的輸出區(qū)域。每個(gè)驅(qū)動(dòng)器右側(cè)的亮點(diǎn)是外部串聯(lián)柵極電阻。圖11中的外部串聯(lián)柵極電阻比另外兩個(gè)熱分布圖中的電阻更熱。這是符合預(yù)期和需要的情況。所有三個(gè)測(cè)試均以相同開關(guān)頻率和相同負(fù)載電容進(jìn)行,因此總功耗相同。外部電阻的功耗越多,柵極驅(qū)動(dòng)器IC本身的功耗就越少。
競(jìng)爭(zhēng)產(chǎn)品1的IC表面溫度比ADuM4221高35.3°C,這是因?yàn)檩^高RDS(ON)對(duì)競(jìng)爭(zhēng)產(chǎn)品有熱限制。類似地,競(jìng)爭(zhēng)產(chǎn)品2的功耗導(dǎo)致其表面溫度比ADuM4221高18.9°C,因而在相同工作條件下其柵極驅(qū)動(dòng)器更熱。這表明,在選擇柵極驅(qū)動(dòng)器時(shí),較低內(nèi)部電阻所產(chǎn)生的散熱能力是重要考慮因素。在較高環(huán)境溫度下工作時(shí),這種溫度升高很重要。表2列出了測(cè)試結(jié)果。
表2.熱性能比較:溫度越低越好
結(jié)論
廠商報(bào)告的拉電流和灌電流額定值差異懸殊,粗略瀏覽數(shù)據(jù)手冊(cè)標(biāo)題便形成對(duì)不同器件驅(qū)動(dòng)強(qiáng)度的看法可能會(huì)產(chǎn)生誤導(dǎo)。峰值電流定義缺乏透明度可能導(dǎo)致器件銷售過多或不足,并極大地影響其在客戶進(jìn)行全面評(píng)估之前被特定應(yīng)用選中的機(jī)會(huì)。為了進(jìn)行公平的比較,須確保數(shù)據(jù)手冊(cè)中提到的峰值電流具有可比性。當(dāng)評(píng)估隔離式柵極驅(qū)動(dòng)器時(shí),應(yīng)考慮熱裕量和低RDS(ON)的重要性。盡管可以將兩個(gè)柵極驅(qū)動(dòng)器的上升和下降值調(diào)整為相同,但選擇RDS(ON)較低的驅(qū)動(dòng)器可以提供更大的熱裕量和更靈活的開關(guān)速度。
推薦閱讀:


