

【導(dǎo)讀】差分驅(qū)動(dòng)器可以由單端或差分信號(hào)驅(qū)動(dòng),今天我們就利用無(wú)端接或端接信號(hào)源來(lái)分析這兩種情況。
1 差分輸入、無(wú)端接信號(hào)源
圖1顯示一個(gè)差分驅(qū)動(dòng)器由一個(gè)平衡的無(wú)端接信號(hào)源驅(qū)動(dòng)。這種情況通常是針對(duì)低阻抗信號(hào)源,信號(hào)源與驅(qū)動(dòng)器之間的連接距離非常短。
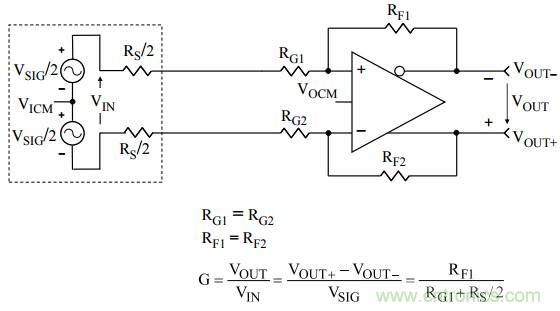
圖1:差分輸入、無(wú)端接信號(hào)源
設(shè)計(jì)輸入為源阻抗RS、增益設(shè)置電阻RG1和所需的增益G。注意:增益相對(duì)于信號(hào)電壓源VSIG進(jìn)行測(cè)量。
相對(duì)于信號(hào)源VSIG,增益設(shè)置電阻的總值等于RG1+RS/2。此外,RG2=RG1。這樣,所需的反饋電阻值(RF1=RF2)就可以通過(guò)下式計(jì)算:
2 差分輸入、端接信號(hào)源
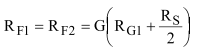
許多情況下,差分驅(qū)動(dòng)源需要驅(qū)動(dòng)雙絞線,此時(shí)必須將雙絞線端接為其特征阻抗,以便保持高帶寬并使反射最小,如圖2所示。

圖2. 差分輸入、端接信號(hào)源
設(shè)計(jì)輸入為源阻抗RS、增益設(shè)置電阻RG1和所需的增益G。注意:對(duì)于端接情形,增益是相對(duì)于端接電阻的差分電壓(VIN=VD+ –VD-)進(jìn)行測(cè)量。
對(duì)于平衡的差分驅(qū)動(dòng),輸入阻抗RIN等于2RG1。端接電阻RT按照如下條件選擇:RT || RIN = RS,或者
這樣,所需的反饋電阻值(RF1=RF2)就可以通過(guò)下式計(jì)算:
3 單端輸入、無(wú)端接信號(hào)源
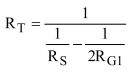
許多應(yīng)用中,差分放大器會(huì)提供一種有效的途徑將單端信號(hào)轉(zhuǎn)換成差分信號(hào)。圖3顯示的是無(wú)端接單端驅(qū)動(dòng)器的情形。
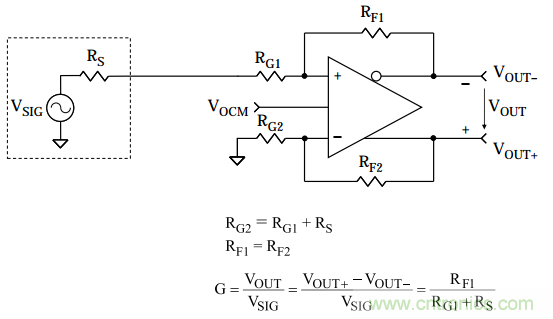
圖3. 單端輸入、無(wú)端接信號(hào)源
設(shè)計(jì)輸入為源阻抗RS、增益設(shè)置電阻RG1和所需的增益G。注意:增益相對(duì)于信號(hào)電壓源VSIG進(jìn)行測(cè)量。
為了防止VOCM在差分輸出端產(chǎn)生不良的失調(diào)電壓,差分放大器的兩個(gè)輸入端看到的凈阻抗必須相等。因此,
這樣,反饋電阻值就可以通過(guò)下式計(jì)算:
4 單端輸入、端接信號(hào)源
圖4顯示一個(gè)極常見的應(yīng)用,其中單端信號(hào)源驅(qū)動(dòng)一條同軸電纜;為使反射最小并且保持高帶寬,必須適當(dāng)端接同軸電纜。
設(shè)計(jì)輸入為源阻抗RS、增益設(shè)置電阻RG1和所需的增益G。注意:增益相對(duì)于端接電阻的電壓VIN進(jìn)行測(cè)量。
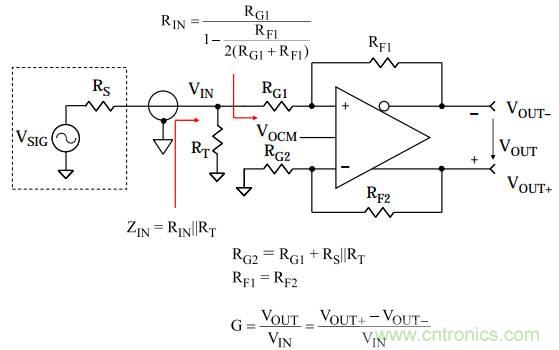
圖4. 單端輸入、端接信號(hào)源
已知所需的增益G、增益設(shè)置電阻RG1和信號(hào)源電阻RS,計(jì)算反饋電阻RF1A的初始值。此電阻的最終值將會(huì)略有提高,原因是需要提高RG2以匹配輸入阻抗,這將通過(guò)下面的公式計(jì)算。計(jì)算過(guò)程如下:
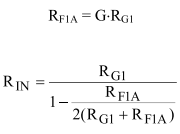

輸入電壓VIN與信號(hào)源電壓VSIG具有如下關(guān)系:
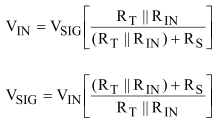
為了計(jì)算反饋電阻的最終值,使用圖5所示的戴維寧等效電路。
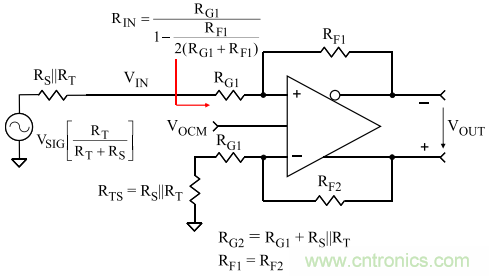
圖5. 戴維寧等效輸入電路
輸出電壓可以表示為源電壓的函數(shù):
本文轉(zhuǎn)載自ADI.
推薦閱讀:



