
【導(dǎo)讀】利用ADC、PLL和RF收發(fā)器的現(xiàn)代信號處理系統(tǒng)設(shè)計通常需要更低的功耗和更高的系統(tǒng)性能。為這些噪聲敏感的設(shè)備選擇合適的電源始終是系統(tǒng)設(shè)計人員的難點。這些設(shè)計總是需要在高效率和高性能之間做出取舍。
傳統(tǒng)上,LDO穩(wěn)壓器通常被用于為那些噪聲敏感的設(shè)備供電。LDO穩(wěn)壓器能夠抑制系統(tǒng)電源中經(jīng)常出現(xiàn)的低頻噪聲,并且為ADC、PLL或RF收發(fā)器提供干凈的電源。但是LDO穩(wěn)壓器通常效率較低,尤其是在LDO穩(wěn)壓器必須將高于輸出電壓幾伏的電源軌降壓的那些系統(tǒng)中。在這種情況下,LDO穩(wěn)壓器通常可提供30%至50%的效率,而使用開關(guān)穩(wěn)壓器則可實現(xiàn)90%甚至更高的效率。
開關(guān)穩(wěn)壓器雖然比LDO穩(wěn)壓器效率更高,但它們的噪聲太大,無法在不顯著降低ADC或者PLL的性能的同時,直接為它們供電。開關(guān)穩(wěn)壓器的噪聲源之一是輸出紋波,它可能在ADC的輸出頻譜中表現(xiàn)為明顯的信號音或雜散。為避免降低信噪比(SNR)和無雜散動態(tài)范圍(SFDR),最大程度地減少開關(guān)穩(wěn)壓器的輸出紋波和輸出噪聲非常重要。
為了同時保持高效率和高系統(tǒng)性能,通常需要在開關(guān)穩(wěn)壓器的輸出端增加一個次級LC濾波器(L2和C2),以減少紋波和抑制噪聲(如圖1所示)。然而,二級LC輸出濾波器也具有相應(yīng)的缺點。理想情況下,功率級傳輸函數(shù)的建模為四階系統(tǒng),很不穩(wěn)定。如果再考慮電流環(huán)路1的采樣數(shù)據(jù)效應(yīng),則完整的控制至輸出的傳遞函數(shù)為五階系統(tǒng)。另一種替代解決方案是檢測初級LC濾波器(L1和C1)點的輸出電壓來穩(wěn)定系統(tǒng)。然而,當負載電流很大時,由于次級LC濾波器上的壓降很大,應(yīng)用這種方法會導(dǎo)致輸出電壓調(diào)節(jié)性能較差,這在某些應(yīng)用中令人無法接受。
本文提出了一種新的混合反饋方法,能夠在應(yīng)用中采用帶有次級LC濾波器的開關(guān)穩(wěn)壓器為ADC、PLL或RF收發(fā)器提供高效率、高性能的電源,同時在所有負載條件下提供足夠的穩(wěn)定性裕量并保持輸出精度。
有些已經(jīng)發(fā)表的關(guān)于帶有次級LC輸出濾波器的DC-DC轉(zhuǎn)換器的研究性文章,具體而言,"帶有低電壓/高電流輸出的二級DC-DC轉(zhuǎn)換器的控制環(huán)路設(shè)計" 和 "帶有二級LC輸出濾波器的高帶寬交流電源的多環(huán)路控制方案的比較評估" 這兩篇文章討論了二級電壓模式轉(zhuǎn)換器的建模和控制(該轉(zhuǎn)換器不能直接應(yīng)用于電流模式轉(zhuǎn)換器)。文章"用于電流模式控制轉(zhuǎn)換器的次級LC濾波器分析和設(shè)計技術(shù)" 和 "用于多模塊轉(zhuǎn)換器系統(tǒng)的三環(huán)路控制"討論了帶有次級LC濾波器的電流模式轉(zhuǎn)換器的分析和建模。不過,這兩篇文章都假設(shè)次級電感的電感值比初級電感小得多,這在實際應(yīng)用中并不總是合適。
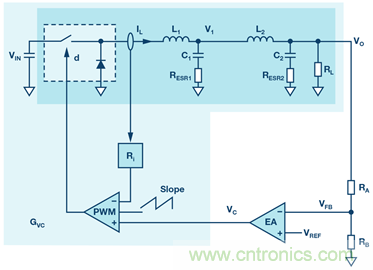
圖1. 帶有次級LC濾波器的電流模式降壓轉(zhuǎn)換器的電路圖。
分析了具有次級LC濾波器的降壓轉(zhuǎn)換器的小信號建模。提出了一個新的五階控制至輸出的傳遞函數(shù),無論外圍電感和電容參數(shù)如何,都非常精確。
提出了一種新的混合反饋方法,可在提供足夠的穩(wěn)定性裕量的同時保持輸出電壓良好的直流精度。首次分析了反饋參數(shù)的限值,為實際設(shè)計提供了基本依據(jù)。
基于功率級小信號模型和新的混合反饋方法,設(shè)計了補償網(wǎng)絡(luò)。利用奈奎斯特圖評估了閉環(huán)傳遞函數(shù)的穩(wěn)定性。
提供了一個基于電源管理產(chǎn)品ADP5014的簡單設(shè)計實例。借助次級LC濾波器,ADP5014在高頻范圍內(nèi)的輸出噪聲性能甚至優(yōu)于LDO穩(wěn)壓器。
功率級小信號建模
圖2顯示了對應(yīng)于圖1的小信號框圖。控制環(huán)路由內(nèi)部電流環(huán)路和外部電壓環(huán)路組成。電流環(huán)路中的采樣數(shù)據(jù)系數(shù)He(s)是指RaymondB. Ridley在"用于電流模式控制的新型連續(xù)時間模型"中提出的模型。請注意,在圖2所示的簡化小信號框圖中,假設(shè)輸入電壓干擾和負載電流干擾為零,因為本文不討論與輸入電壓和負載電流相關(guān)的傳遞函數(shù)。
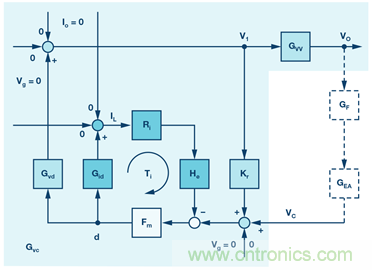
圖2. 帶有次級LC濾波器的電流模式降壓轉(zhuǎn)換器的小信號框圖。
降壓轉(zhuǎn)換器示例
使用電流模式降壓轉(zhuǎn)換器所演示的新的小信號模型具有以下參數(shù):
● Vg = 5 V
● Vo = 2 V
● L1 = 0.8 μH
● L2 = 0.22 μH
● C1 = 47 μF
● C2 = 3× 47 μF
● RESR1 = 2 mΩ
● RESR2 = 2 mΩ
● RL = 1 Ω
● Ri = 0.1 Ω
● Ts = 0.833 μs
電流環(huán)路增益
我們關(guān)心的第一個傳遞函數(shù)是在占空比調(diào)制器的輸出點測得的電流環(huán)路增益。由此產(chǎn)生的電流環(huán)路傳遞函數(shù)(見附錄I中的公式16)表現(xiàn)為具有兩對復(fù)數(shù)共軛極點的四階系統(tǒng),該系統(tǒng)產(chǎn)生兩個系統(tǒng)諧振頻率(ω1和ω2)。這兩個諧振頻率均由L1、L2、C1和C2決定。負載電阻RL以及C1和C2產(chǎn)生主零點。一對復(fù)數(shù)共軛零點(ω3)由L2、C1和C2決定。此外,電流環(huán)路中的采樣數(shù)據(jù)系數(shù)He(s)將在開關(guān)頻率的1/2處引入一對復(fù)數(shù)的右半平面(RHP)零點。
與不帶次級LC濾波器的傳統(tǒng)電流模式降壓轉(zhuǎn)換器相比,新的電流環(huán)路增益增加了一對復(fù)數(shù)共軛極點和一對復(fù)數(shù)共軛零點,并且它們彼此的位置非常接近。
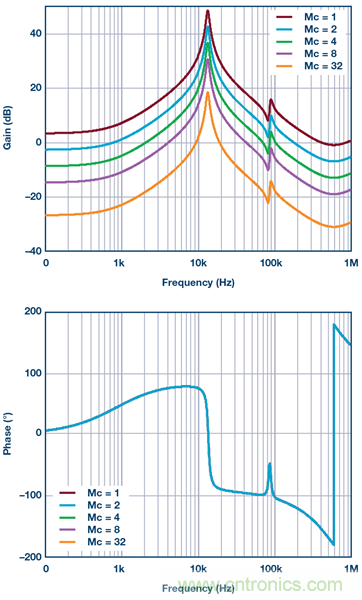
圖3. 降壓轉(zhuǎn)換器電流環(huán)路增益。
圖3顯示了具有不同外部斜坡值的電流環(huán)路增益圖。對于沒有外部斜率補償(Mc=1)的情況,可以看出電流環(huán)路中的相位裕量非常小,這可能導(dǎo)致次諧波振蕩。通過增加外部斜率補償,增益和相位曲線的形狀不會改變,但增益的幅度將減小,相位裕量將增加。
控制至輸出增益
當電流環(huán)路閉合時,會產(chǎn)生一個新的控制至輸出的傳遞函數(shù)。由此產(chǎn)生的控制至輸出的傳遞函數(shù)(見附錄I中的公式19)表現(xiàn)為具有一個主極點(ωp)和兩對復(fù)數(shù)共軛極點(ωl和ωh)的五階系統(tǒng)。主極點主要取決于負載電阻RL、C1,和C2。頻率較低的一對共軛極點由L2、C1和C2確定,而頻率較高的一對共軛極點位于開關(guān)頻率的1/2處。此外,C1的ESR和C2的ESR分別影響兩個零點。
圖4顯示了具有不同外部斜坡值的控制至輸出的環(huán)路增益圖。與傳統(tǒng)的電流模式降壓轉(zhuǎn)換器相比,在帶有次級LC濾波器的電流模式降壓轉(zhuǎn)換器的控制至輸出的增益中增加了一對復(fù)數(shù)共軛極點(ωl)。額外的諧振極點可以提供最大可達180°的額外的相位延遲。相位裕量將急劇下降,即便使用III型補償系統(tǒng)也會很不穩(wěn)定。此外,圖4清楚地顯示了隨著斜率補償?shù)脑黾樱瑥碾娏髂J娇刂频诫妷耗J娇刂频霓D(zhuǎn)換。

圖4. 降壓轉(zhuǎn)換器的控制至輸出的傳遞函數(shù)
混合反饋方法
本文將介紹一種新的混合反饋結(jié)構(gòu),如圖5(a)所示?;旌戏答伒臉?gòu)思是通過利用來自初級LC濾波器的附加電容反饋來穩(wěn)定控制環(huán)路。從輸出端經(jīng)過電阻分壓器的外部電壓反饋定義為遠程電壓反饋,而經(jīng)過電容器CF的內(nèi)部電壓反饋將在下文中定義為本地電壓反饋。遠程反饋和本地反饋在頻域上承載不同的信息。具體而言,遠程反饋檢測低頻信號以便提供良好的直流輸出調(diào)節(jié),而本地反饋檢測高頻信號以便為系統(tǒng)提供良好的交流穩(wěn)定性。圖5(b)顯示了對應(yīng)于圖5(a)的簡化小信號框圖。

圖5. 使用所提出的混合反饋方法的電流模式降壓轉(zhuǎn)換器,圖(a)所示為電路圖,圖(b)所示為小信號模型。
反饋網(wǎng)絡(luò)的傳遞函數(shù)
由此產(chǎn)生的混合反饋結(jié)構(gòu)的等效傳遞函數(shù)(見附錄II中的公式31和公式32)與傳統(tǒng)電阻分壓器反饋的傳遞函數(shù)明顯不同。新的混合反饋的傳遞函數(shù)零點比極點更多,并且額外的零點將在由L2和C2確定的諧振頻率處產(chǎn)生180°的相位提前。因此,利用混合反饋方法,控制至輸出的傳遞函數(shù)中的附加相位延遲將通過反饋傳遞函數(shù)中的附加零點進行補償,這可以實現(xiàn)基于整個控制至反饋的傳遞函數(shù)的補償設(shè)計。
反饋參數(shù)的限值
除了功率級中的那些參數(shù)之外,反饋傳遞函數(shù)中還包含兩個參數(shù)。眾所周知,參數(shù)β(見附錄II中的公式30)是輸出電壓放大率。而參數(shù)α則是一個全新的概念。
可以調(diào)整反饋參數(shù)α(參見附錄II中的公式29)來理解反饋傳遞函數(shù)的行為。圖6顯示了當α減小時反饋傳遞中零點的變化趨勢。該圖清楚地表明,隨著α逐漸減小,一對共軛零點將從左半平面(LHP)向RHP推進。
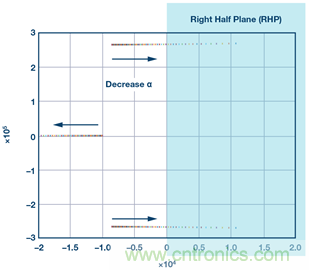
圖6. 反饋參數(shù)α對反饋網(wǎng)絡(luò)零點的影響。
圖7是具有不同α值的反饋傳遞函數(shù)的曲線圖。它表明當α減小至10-6時(例如:RA=10k,CF=1nF),反饋網(wǎng)絡(luò)的傳遞函數(shù)將表現(xiàn)為180°的相位延遲,這意味著復(fù)數(shù)零點已成為RHP零點。反饋傳遞函數(shù)已簡化為新形式(參見附錄II中的公式33)。要將零點保持在LHP中,參數(shù)α應(yīng)始終滿足以下條件:

公式1給出了反饋參數(shù)α的最小限值基準。只要滿足這一條件,控制系統(tǒng)就很容易保持穩(wěn)定。但是,由于RA和CF在負載瞬態(tài)跳變期間將作為輸出電壓變化的RC濾波器工作,因此負載瞬態(tài)性能將因很大的α值而降低。所以α值不應(yīng)該太大。在實際設(shè)計中,建議參數(shù)α比最小限值大20%到30%左右。
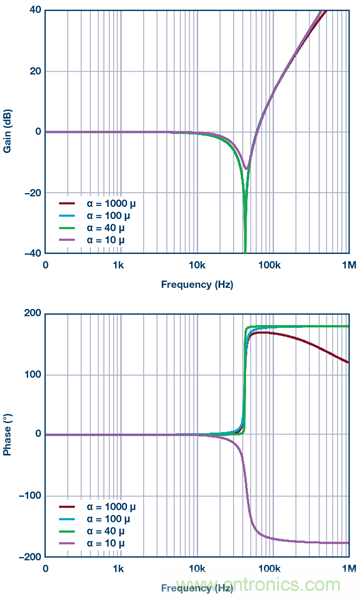
圖7. 具有不同參數(shù)α的混合反饋網(wǎng)絡(luò)的傳遞函數(shù)。
環(huán)路補償設(shè)計
設(shè)計補償
控制至反饋的傳遞函數(shù)GP(s)可以通過控制至輸出的傳遞函數(shù)Gvc(s)和反饋傳遞函數(shù)GFB(s)的乘積導(dǎo)出。補償傳遞函數(shù)GC(s)設(shè)計為具有一個零點和一個極點??刂浦练答伒膫鬟f函數(shù)和補償傳遞函數(shù)以及閉環(huán)傳遞函數(shù)TV(s)的漸近波特圖如圖8所示。以下步驟說明了如何設(shè)計補償傳遞函數(shù)。
● 確定穿越頻率(fc)。由于帶寬受fz1限制,建議選擇小于fz1的fc
● 在fc處計算GP(s)的增益,而GC(s)的中頻帶增益應(yīng)為GP(s)的相反數(shù)
● 將補償零點置于功率級的主極點(fp1)處
● 將補償極點置于由輸出電容C1的ESR產(chǎn)生的零點(fz2)處。
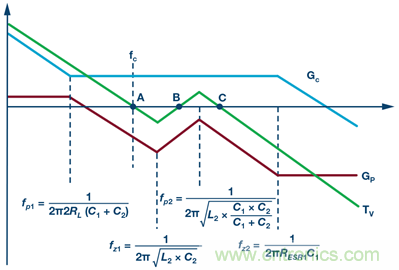
圖8. 基于所提出的控制至輸出和混合反饋的傳遞函數(shù)的環(huán)路增益設(shè)計。
使用奈奎斯特圖分析穩(wěn)定性
根據(jù)圖8,閉環(huán)傳遞函數(shù)TV(s)已經(jīng)三次經(jīng)過0dB點。奈奎斯特圖用于分析閉環(huán)傳遞函數(shù)的穩(wěn)定性,如圖9所示。由于曲線圖遠離(–1,j0),閉環(huán)穩(wěn)定并具有足夠的相位裕量。請注意,奈奎斯特圖中的點A、B和C對應(yīng)于波特圖中的點A、B和C
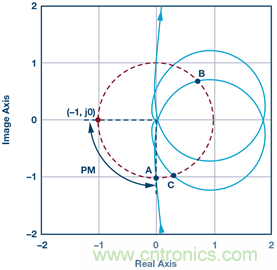
圖9. 閉環(huán)傳遞函數(shù)的奈奎斯特圖。
設(shè)計示例
ADP5014對許多模擬模塊進行了優(yōu)化,可在低頻范圍內(nèi)實現(xiàn)更低的輸出噪聲。當VOUT設(shè)置為小于VREF電壓時,單位增益電壓基準結(jié)構(gòu)也可使輸出噪聲與輸出電壓設(shè)置無關(guān)。設(shè)計中又增加了一個次級LC濾波器,從而可以衰減高頻范圍的輸出噪聲,特別是對于基波下的開關(guān)紋波及其諧波。圖10顯示了設(shè)計詳情。
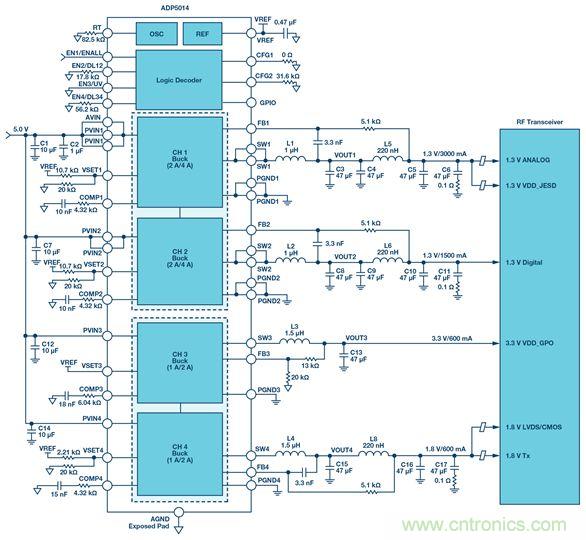
圖10. 由帶有次級LC濾波器的ADP5014供電的RF收發(fā)器。
圖11顯示了ADP5014在10Hz至10MHz頻率范圍內(nèi)的噪聲譜密度測量結(jié)果,以及10Hz至1MHz頻率范圍內(nèi)的積分有效值噪聲,與之作比較的ADP1740則是另一款傳統(tǒng)的2A低噪聲LDO穩(wěn)壓器。ADP5014在高頻范圍內(nèi)的輸出噪聲性能甚至優(yōu)于ADP1740。

圖11. ADP5014與ADP1740的輸出噪聲性能比較,圖(a)所示為噪聲譜密度,圖(b)所示為積分有效值噪聲。
結(jié)論
本文介紹了用于建模和控制帶有次級LC輸出濾波器的電流模式降壓轉(zhuǎn)換器的通用分析框架,討論了精確的控制到輸出的傳遞函數(shù),提出了一種新的混合反饋結(jié)構(gòu),并對反饋參數(shù)限值進行了推導(dǎo)。設(shè)計示例表明,帶有次級LC濾波器和混合反饋方法的開關(guān)穩(wěn)壓器可以提供干凈、穩(wěn)定的電源,性能堪比LDO穩(wěn)壓器,甚至更好。本文中的建模和控制主要關(guān)注電流模式降壓轉(zhuǎn)換器,但此處描述的方法也適用于電壓模式降壓轉(zhuǎn)換器。
推薦閱讀:

